18 KiB
C, phát âm là I-squared-C, là một giao thức đa bộ điều khiển, đa thiết bị ngoại vi, trong đó bất kỳ thiết bị nào được kết nối đều có thể hoạt động như một bộ điều khiển hoặc thiết bị ngoại vi giao tiếp qua bus I²C (tên gọi của hệ thống truyền dữ liệu). Dữ liệu được gửi dưới dạng các gói địa chỉ, mỗi gói chứa địa chỉ của thiết bị được kết nối mà nó hướng đến.
💁 Mô hình này trước đây được gọi là master/slave, nhưng thuật ngữ này đang bị loại bỏ do liên quan đến chế độ nô lệ. Hiệp hội Phần cứng Mã nguồn Mở đã áp dụng thuật ngữ controller/peripheral, nhưng bạn vẫn có thể thấy các tài liệu tham khảo đến thuật ngữ cũ.
Các thiết bị có một địa chỉ được sử dụng khi chúng kết nối với bus I²C, và thường được mã hóa cứng trên thiết bị. Ví dụ, mỗi loại cảm biến Grove từ Seeed có cùng địa chỉ, vì vậy tất cả các cảm biến ánh sáng có cùng địa chỉ, tất cả các nút có cùng địa chỉ khác với địa chỉ của cảm biến ánh sáng. Một số thiết bị có cách thay đổi địa chỉ, bằng cách thay đổi cài đặt jumper hoặc hàn các chân lại với nhau.
I²C có một bus gồm 2 dây chính, cùng với 2 dây nguồn:
| Dây | Tên | Mô tả |
|---|---|---|
| SDA | Serial Data | Dây này dùng để gửi dữ liệu giữa các thiết bị. |
| SCL | Serial Clock | Dây này gửi tín hiệu đồng hồ với tốc độ được đặt bởi bộ điều khiển. |
| VCC | Voltage common collector | Nguồn cung cấp cho các thiết bị. Dây này được kết nối với dây SDA và SCL để cung cấp năng lượng thông qua một điện trở kéo lên, giúp tắt tín hiệu khi không có thiết bị nào là bộ điều khiển. |
| GND | Ground | Cung cấp một điểm nối đất chung cho mạch điện. |
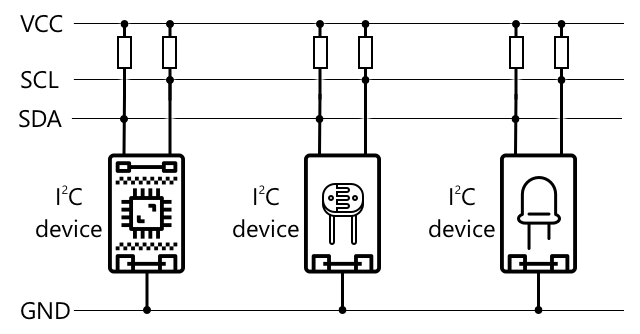
Để gửi dữ liệu, một thiết bị sẽ phát ra điều kiện bắt đầu để cho biết nó sẵn sàng gửi dữ liệu. Sau đó, nó sẽ trở thành bộ điều khiển. Bộ điều khiển sau đó gửi địa chỉ của thiết bị mà nó muốn giao tiếp, cùng với việc nó muốn đọc hay ghi dữ liệu. Sau khi dữ liệu đã được truyền, bộ điều khiển gửi điều kiện dừng để chỉ ra rằng nó đã hoàn thành. Sau đó, một thiết bị khác có thể trở thành bộ điều khiển và gửi hoặc nhận dữ liệu.
I2C có giới hạn tốc độ, với 3 chế độ khác nhau chạy ở tốc độ cố định. Chế độ nhanh nhất là chế độ High Speed với tốc độ tối đa 3.4Mbps (megabit mỗi giây), mặc dù rất ít thiết bị hỗ trợ tốc độ này. Ví dụ, Raspberry Pi bị giới hạn ở chế độ Fast với tốc độ 400Kbps (kilobit mỗi giây). Chế độ Standard chạy ở tốc độ 100Kbps.
💁 Nếu bạn đang sử dụng Raspberry Pi với Grove Base hat làm phần cứng IoT, bạn sẽ thấy một số ổ cắm I2C trên bo mạch mà bạn có thể sử dụng để giao tiếp với các cảm biến I2C. Các cảm biến Analog Grove cũng sử dụng I2C với ADC để gửi giá trị analog dưới dạng dữ liệu số, vì vậy cảm biến ánh sáng bạn đã sử dụng mô phỏng một chân analog, với giá trị được gửi qua I2C vì Raspberry Pi chỉ hỗ trợ chân số.
Bộ thu-phát không đồng bộ toàn cầu (UART)
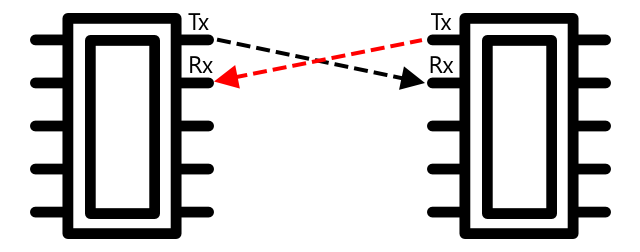
UART liên quan đến mạch vật lý cho phép hai thiết bị giao tiếp. Mỗi thiết bị có 2 chân giao tiếp - truyền (Tx) và nhận (Rx), với chân Tx của thiết bị đầu tiên được kết nối với chân Rx của thiết bị thứ hai, và chân Tx của thiết bị thứ hai được kết nối với chân Rx của thiết bị đầu tiên. Điều này cho phép dữ liệu được gửi theo cả hai hướng.
- Thiết bị 1 truyền dữ liệu từ chân Tx của nó, được nhận bởi thiết bị 2 trên chân Rx của nó
- Thiết bị 1 nhận dữ liệu trên chân Rx của nó được truyền bởi thiết bị 2 từ chân Tx của nó
🎓 Dữ liệu được gửi từng bit một, và điều này được gọi là giao tiếp serial. Hầu hết các hệ điều hành và vi điều khiển đều có cổng serial, tức là các kết nối có thể gửi và nhận dữ liệu serial mà mã của bạn có thể sử dụng.
Thiết bị UART có tốc độ baud (còn được gọi là tốc độ ký hiệu), là tốc độ mà dữ liệu sẽ được gửi và nhận tính bằng bit mỗi giây. Một tốc độ baud phổ biến là 9,600, nghĩa là 9,600 bit (0 và 1) dữ liệu được gửi mỗi giây.
UART sử dụng các bit bắt đầu và kết thúc - tức là nó gửi một bit bắt đầu để chỉ ra rằng nó sắp gửi một byte (8 bit) dữ liệu, sau đó là một bit kết thúc sau khi gửi 8 bit.
Tốc độ UART phụ thuộc vào phần cứng, nhưng ngay cả các triển khai nhanh nhất cũng không vượt quá 6.5 Mbps (megabit mỗi giây, hoặc hàng triệu bit, 0 hoặc 1, được gửi mỗi giây).
Bạn có thể sử dụng UART qua các chân GPIO - bạn có thể đặt một chân làm Tx và một chân khác làm Rx, sau đó kết nối chúng với một thiết bị khác.
💁 Nếu bạn đang sử dụng Raspberry Pi với Grove Base hat làm phần cứng IoT, bạn sẽ thấy một ổ cắm UART trên bo mạch mà bạn có thể sử dụng để giao tiếp với các cảm biến sử dụng giao thức UART.
Giao diện ngoại vi nối tiếp (SPI)
SPI được thiết kế để giao tiếp ở khoảng cách ngắn, chẳng hạn như trên một vi điều khiển để nói chuyện với một thiết bị lưu trữ như bộ nhớ flash. Nó dựa trên mô hình bộ điều khiển/phụ kiện với một bộ điều khiển duy nhất (thường là bộ xử lý của thiết bị IoT) tương tác với nhiều phụ kiện. Bộ điều khiển kiểm soát mọi thứ bằng cách chọn một phụ kiện và gửi hoặc yêu cầu dữ liệu.
💁 Giống như I2C, các thuật ngữ bộ điều khiển và phụ kiện là những thay đổi gần đây, vì vậy bạn có thể thấy các thuật ngữ cũ vẫn được sử dụng.
Bộ điều khiển SPI sử dụng 3 dây, cùng với 1 dây bổ sung cho mỗi phụ kiện. Các phụ kiện sử dụng 4 dây. Các dây này bao gồm:
| Dây | Tên | Mô tả |
|---|---|---|
| COPI | Controller Output, Peripheral Input | Dây này dùng để gửi dữ liệu từ bộ điều khiển đến phụ kiện. |
| CIPO | Controller Input, Peripheral Output | Dây này dùng để gửi dữ liệu từ phụ kiện đến bộ điều khiển. |
| SCLK | Serial Clock | Dây này gửi tín hiệu đồng hồ với tốc độ được đặt bởi bộ điều khiển. |
| CS | Chip Select | Bộ điều khiển có nhiều dây, mỗi dây cho một phụ kiện, và mỗi dây kết nối với dây CS trên phụ kiện tương ứng. |
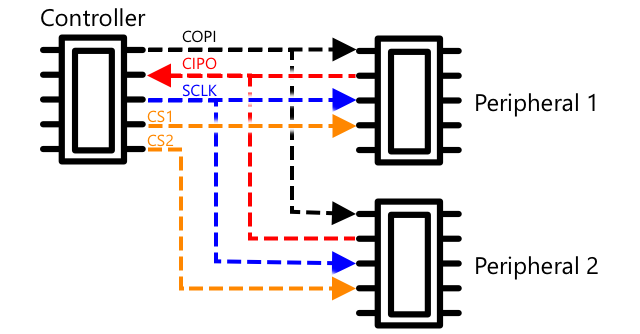
Dây CS được sử dụng để kích hoạt một phụ kiện tại một thời điểm, giao tiếp qua các dây COPI và CIPO. Khi bộ điều khiển cần thay đổi phụ kiện, nó sẽ hủy kích hoạt dây CS kết nối với phụ kiện hiện đang hoạt động, sau đó kích hoạt dây kết nối với phụ kiện mà nó muốn giao tiếp tiếp theo.
SPI là full-duplex, nghĩa là bộ điều khiển có thể gửi và nhận dữ liệu cùng lúc từ cùng một phụ kiện bằng các dây COPI và CIPO. SPI sử dụng tín hiệu đồng hồ trên dây SCLK để giữ các thiết bị đồng bộ, vì vậy không giống như gửi trực tiếp qua UART, nó không cần các bit bắt đầu và kết thúc.
Không có giới hạn tốc độ được định nghĩa cho SPI, với các triển khai thường có thể truyền nhiều megabyte dữ liệu mỗi giây.
Các bộ kit phát triển IoT thường hỗ trợ SPI qua một số chân GPIO. Ví dụ, trên Raspberry Pi bạn có thể sử dụng các chân GPIO 19, 21, 23, 24 và 26 cho SPI.
Không dây
Một số cảm biến có thể giao tiếp qua các giao thức không dây tiêu chuẩn, chẳng hạn như Bluetooth (chủ yếu là Bluetooth Low Energy, hoặc BLE), LoRaWAN (một giao thức mạng tiêu thụ năng lượng thấp với phạm vi xa), hoặc WiFi. Những giao thức này cho phép các cảm biến từ xa không được kết nối vật lý với thiết bị IoT.
Một ví dụ là trong các cảm biến độ ẩm đất thương mại. Những cảm biến này sẽ đo độ ẩm đất trong một cánh đồng, sau đó gửi dữ liệu qua LoRaWAN đến một thiết bị trung tâm, thiết bị này sẽ xử lý dữ liệu hoặc gửi nó qua Internet. Điều này cho phép cảm biến cách xa thiết bị IoT quản lý dữ liệu, giảm tiêu thụ năng lượng và nhu cầu về mạng WiFi lớn hoặc cáp dài.
BLE phổ biến cho các cảm biến tiên tiến như thiết bị theo dõi sức khỏe hoạt động trên cổ tay. Những thiết bị này kết hợp nhiều cảm biến và gửi dữ liệu cảm biến đến một thiết bị IoT dưới dạng điện thoại của bạn qua BLE.
✅ Bạn có cảm biến Bluetooth nào trên người, trong nhà hoặc ở trường không? Những cảm biến này có thể bao gồm cảm biến nhiệt độ, cảm biến hiện diện, thiết bị theo dõi và thiết bị sức khỏe.
Một cách phổ biến để các thiết bị thương mại kết nối là Zigbee. Zigbee sử dụng WiFi để tạo mạng lưới giữa các thiết bị, nơi mỗi thiết bị kết nối với càng nhiều thiết bị gần đó càng tốt, tạo thành một số lượng lớn các kết nối giống như mạng nhện. Khi một thiết bị muốn gửi một tin nhắn đến Internet, nó có thể gửi đến các thiết bị gần nhất, sau đó các thiết bị này chuyển tiếp đến các thiết bị gần đó khác và cứ thế, cho đến khi nó đến một bộ điều phối và có thể được gửi đến Internet.
🐝 Tên Zigbee đề cập đến điệu nhảy lắc lư của ong mật sau khi chúng trở về tổ.
Đo độ ẩm đất
Bạn có thể đo độ ẩm đất bằng cách sử dụng cảm biến độ ẩm đất, một thiết bị IoT, và một cây trồng trong nhà hoặc một mảng đất gần đó.
Nhiệm vụ - đo độ ẩm đất
Làm theo hướng dẫn liên quan để đo độ ẩm đất bằng thiết bị IoT của bạn:
Hiệu chỉnh cảm biến
Cảm biến dựa vào việc đo các đặc tính điện như điện trở hoặc điện dung.
🎓 Điện trở, được đo bằng ohm (Ω), là mức độ cản trở dòng điện đi qua một vật liệu. Khi một điện áp được áp dụng lên một vật liệu, lượng dòng điện đi qua nó phụ thuộc vào điện trở của vật liệu. Bạn có thể đọc thêm trên trang điện trở điện trên Wikipedia.
🎓 Điện dung, được đo bằng farad (F), là khả năng của một thành phần hoặc mạch để thu thập và lưu trữ năng lượng điện. Bạn có thể đọc thêm về điện dung trên trang điện dung trên Wikipedia.
Những phép đo này không phải lúc nào cũng hữu ích - hãy tưởng tượng một cảm biến nhiệt độ cho bạn một phép đo là 22.5KΩ! Thay vào đó, giá trị đo được cần phải được chuyển đổi thành một đơn vị hữu ích bằng cách được hiệu chỉnh - tức là khớp các giá trị đo được với lượng đo được để cho phép các phép đo mới được chuyển đổi sang đơn vị đúng.
Một số cảm biến được hiệu chỉnh sẵn. Ví dụ, cảm biến nhiệt độ bạn đã sử dụng trong bài học trước đã được hiệu chỉnh để có thể trả về phép đo nhiệt độ bằng °C. Trong nhà máy, cảm biến đầu tiên được tạo ra sẽ được tiếp xúc với một loạt nhiệt độ đã biết và điện trở được đo. Điều này sau đó sẽ được sử dụng để xây dựng một phép tính có thể chuyển đổi từ giá trị đo được bằng Ω (đơn vị của điện trở) sang °C.
💁 Công thức để tính điện trở từ nhiệt độ được gọi là phương trình Steinhart–Hart.
Hiệu chỉnh cảm biến độ ẩm đất
Độ ẩm đất được đo bằng hàm lượng nước trọng lượng hoặc hàm lượng nước thể tích.
- Trọng lượng là trọng lượng của nước trong một đơn vị trọng lượng đất được đo, tính bằng số kilogam nước trên mỗi kilogam đất khô
- Thể tích là thể tích của nước trong một đơn vị thể tích đất được đo, tính bằng số mét khối nước trên mỗi mét khối đất khô
🇺🇸 Đối với người Mỹ, vì sự nhất quán của các đơn vị, những điều này có thể được đo bằng pound thay vì kilogam hoặc feet khối thay vì mét khối.
Cảm biến độ ẩm đất đo điện trở hoặc điện dung - điều này không chỉ thay đổi theo độ ẩm đất, mà còn theo loại đất vì các thành phần trong đất có thể thay đổi đặc tính điện của nó. Lý tưởng nhất là các cảm biến nên được hiệu chỉnh - tức là lấy các phép đo từ cảm biến và so sánh chúng với các phép đo được tìm thấy bằng cách tiếp cận khoa học hơn. Ví dụ, một phòng thí nghiệm có thể tính toán độ ẩm đất trọng lượng bằng cách sử dụng các mẫu của một cánh đồng cụ thể được lấy vài lần trong năm, và những con số này được sử dụng để hiệu chỉnh cảm biến, khớp phép đo của cảm biến với độ ẩm đất trọng lượng.
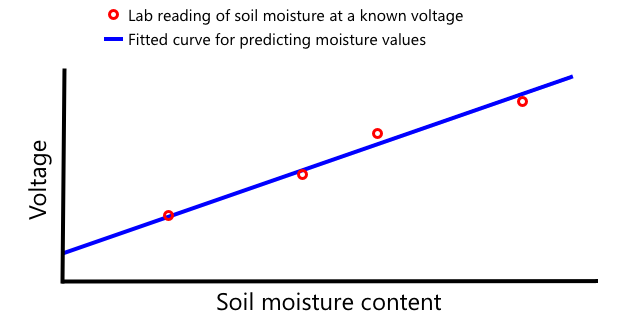
Biểu đồ trên cho thấy cách hiệu chỉnh một cảm biến. Điện áp được ghi lại cho một mẫu đất sau đó được đo trong phòng thí nghiệm bằng cách so sánh trọng lượng ướt với trọng lượng khô (bằng cách đo trọng lượng khi ướt, sau đó sấy khô trong lò và đo trọng lượng khô). Sau khi lấy một vài phép đo, điều này có thể được vẽ trên biểu đồ và một đường được khớp với các điểm. Đường này sau đó có thể được sử dụng để chuyển đổi các phép đo cảm biến độ ẩm đất được thực hiện bởi thiết bị IoT thành các phép đo độ ẩm đất thực tế.
💁 Đối với các cảm biến độ ẩm đất điện trở, điện áp tăng khi độ ẩm đất tăng. Đối với các cảm
Tuyên bố miễn trừ trách nhiệm:
Tài liệu này đã được dịch bằng dịch vụ dịch thuật AI Co-op Translator. Mặc dù chúng tôi cố gắng đảm bảo độ chính xác, xin lưu ý rằng các bản dịch tự động có thể chứa lỗi hoặc không chính xác. Tài liệu gốc bằng ngôn ngữ bản địa nên được coi là nguồn thông tin chính thức. Đối với các thông tin quan trọng, khuyến nghị sử dụng dịch vụ dịch thuật chuyên nghiệp bởi con người. Chúng tôi không chịu trách nhiệm cho bất kỳ sự hiểu lầm hoặc diễn giải sai nào phát sinh từ việc sử dụng bản dịch này.