6.2 KiB
Zajem slike - Virtualna IoT strojna oprema
V tem delu lekcije boste svoji virtualni IoT napravi dodali senzor kamere in iz njega prebrali slike.
Strojna oprema
Virtualna IoT naprava bo uporabljala simulirano kamero, ki pošilja slike bodisi iz datotek bodisi iz vaše spletne kamere.
Dodajanje kamere v CounterFit
Za uporabo virtualne kamere jo morate dodati v aplikacijo CounterFit.
Naloga - dodajte kamero v CounterFit
Dodajte kamero v aplikacijo CounterFit.
-
Na svojem računalniku ustvarite novo Python aplikacijo v mapi z imenom
fruit-quality-detectorz eno datoteko z imenomapp.pyin Python virtualnim okoljem ter dodajte CounterFit pip pakete.⚠️ Po potrebi si lahko ogledate navodila za ustvarjanje in nastavitev CounterFit Python projekta v lekciji 1.
-
Namestite dodaten Pip paket za namestitev CounterFit shima, ki lahko komunicira s senzorji kamere s simulacijo nekaterih funkcij Picamera Pip paketa. Prepričajte se, da to nameščate iz terminala z aktiviranim virtualnim okoljem.
pip install counterfit-shims-picamera -
Prepričajte se, da je spletna aplikacija CounterFit zagnana.
-
Ustvarite kamero:
-
V polju Create sensor v podoknu Sensors izberite spustni meni Sensor type in izberite Camera.
-
Nastavite Name na
Picamera. -
Izberite gumb Add, da ustvarite kamero.
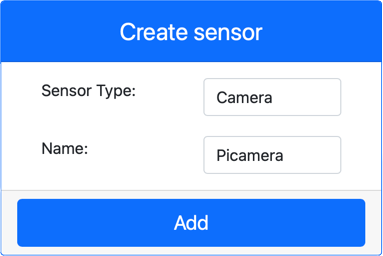
Kamera bo ustvarjena in se bo pojavila na seznamu senzorjev.
-
Programiranje kamere
Virtualna IoT naprava je zdaj pripravljena za programiranje za uporabo virtualne kamere.
Naloga - programirajte kamero
Programirajte napravo.
-
Prepričajte se, da je aplikacija
fruit-quality-detectorodprta v VS Code. -
Odprite datoteko
app.py. -
Dodajte naslednjo kodo na vrh datoteke
app.py, da povežete aplikacijo s CounterFit:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Dodajte naslednjo kodo v datoteko
app.py:import io from counterfit_shims_picamera import PiCameraTa koda uvozi nekaj potrebnih knjižnic, vključno s
PiCamerarazredom iz knjižnice counterfit_shims_picamera. -
Dodajte naslednjo kodo pod to, da inicializirate kamero:
camera = PiCamera() camera.resolution = (640, 480) camera.rotation = 0Ta koda ustvari objekt PiCamera, nastavi ločljivost na 640x480. Čeprav so podprte višje ločljivosti, slikovni klasifikator deluje na veliko manjših slikah (227x227), zato ni potrebe po zajemanju in pošiljanju večjih slik.
Vrstica
camera.rotation = 0nastavi rotacijo slike v stopinjah. Če morate sliko iz spletne kamere ali datoteke zasukati, to nastavite ustrezno. Na primer, če želite spremeniti sliko banane na spletni kameri v ležečem načinu v pokončni način, nastavitecamera.rotation = 90. -
Dodajte naslednjo kodo pod to, da zajamete sliko kot binarne podatke:
image = io.BytesIO() camera.capture(image, 'jpeg') image.seek(0)Ta koda ustvari objekt
BytesIOza shranjevanje binarnih podatkov. Slika se prebere iz kamere kot JPEG datoteka in shrani v ta objekt. Ta objekt ima kazalec položaja, ki označuje, kje se nahaja v podatkih, tako da se lahko po potrebi doda več podatkov na konec. Vrsticaimage.seek(0)premakne ta kazalec nazaj na začetek, da se lahko kasneje preberejo vsi podatki. -
Pod to dodajte naslednjo kodo za shranjevanje slike v datoteko:
with open('image.jpg', 'wb') as image_file: image_file.write(image.read())Ta koda odpre datoteko z imenom
image.jpgza pisanje, nato prebere vse podatke iz objektaBytesIOin jih zapiše v datoteko.💁 Slika se lahko zajame neposredno v datoteko namesto v objekt
BytesIOtako, da se ime datoteke posreduje klicucamera.capture. Razlog za uporabo objektaBytesIOje, da boste kasneje v tej lekciji sliko poslali svojemu slikovnemu klasifikatorju. -
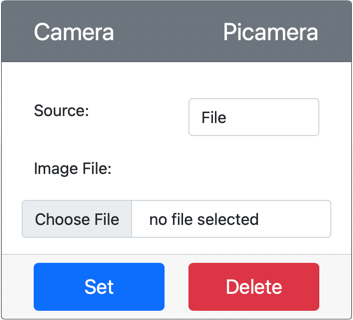
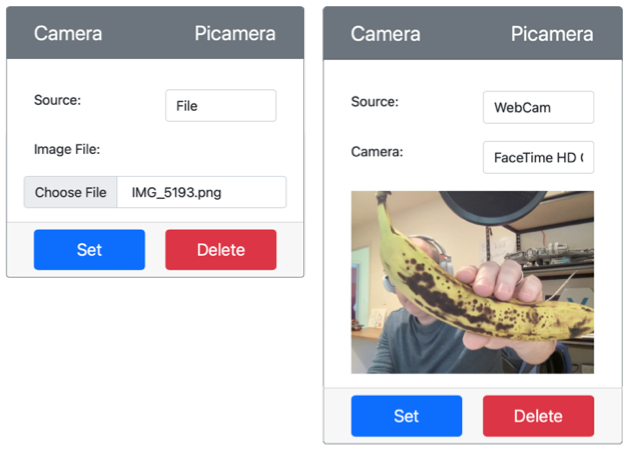
Konfigurirajte sliko, ki jo bo kamera v CounterFit zajela. Lahko nastavite Source na File, nato naložite slikovno datoteko, ali pa nastavite Source na WebCam, in slike bodo zajete iz vaše spletne kamere. Prepričajte se, da ste po izbiri slike ali spletne kamere izbrali gumb Set.
-
Slika bo zajeta in shranjena kot
image.jpgv trenutni mapi. To datoteko boste videli v raziskovalcu VS Code. Izberite datoteko, da si ogledate sliko. Če jo je treba zasukati, posodobite vrsticocamera.rotation = 0po potrebi in posnemite novo sliko.
💁 To kodo lahko najdete v mapi code-camera/virtual-iot-device.
😀 Vaš program za kamero je bil uspešen!
Omejitev odgovornosti:
Ta dokument je bil preveden z uporabo storitve za strojno prevajanje Co-op Translator. Čeprav si prizadevamo za natančnost, vas prosimo, da upoštevate, da lahko avtomatizirani prevodi vsebujejo napake ali netočnosti. Izvirni dokument v njegovem izvirnem jeziku je treba obravnavati kot avtoritativni vir. Za ključne informacije priporočamo strokovno človeško prevajanje. Ne prevzemamo odgovornosti za morebitna nesporazumevanja ali napačne razlage, ki izhajajo iz uporabe tega prevoda.