8.5 KiB
Čítanie GPS údajov - Raspberry Pi
V tejto časti lekcie pridáte k svojmu Raspberry Pi GPS senzor a budete z neho čítať údaje.
Hardvér
Raspberry Pi potrebuje GPS senzor.
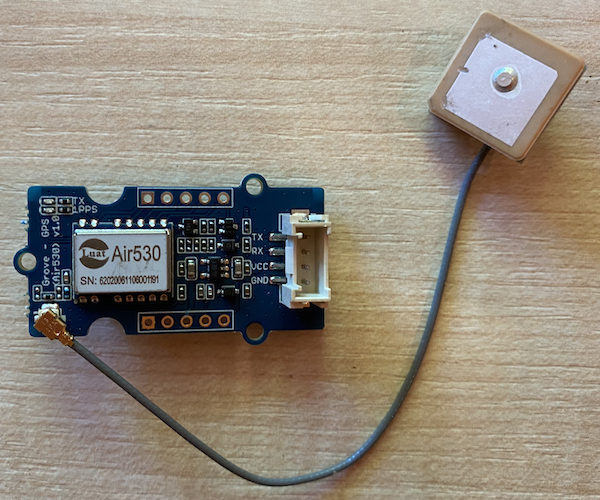
Senzor, ktorý budete používať, je Grove GPS Air530 senzor. Tento senzor sa dokáže pripojiť k viacerým GPS systémom pre rýchle a presné určenie polohy. Senzor sa skladá z dvoch častí - hlavnej elektroniky senzora a externej antény pripojenej tenkým káblom, ktorá zachytáva rádiové vlny zo satelitov.
Ide o UART senzor, takže posiela GPS údaje cez UART.
Pripojenie GPS senzora
Grove GPS senzor je možné pripojiť k Raspberry Pi.
Úloha - pripojte GPS senzor
Pripojte GPS senzor.
-
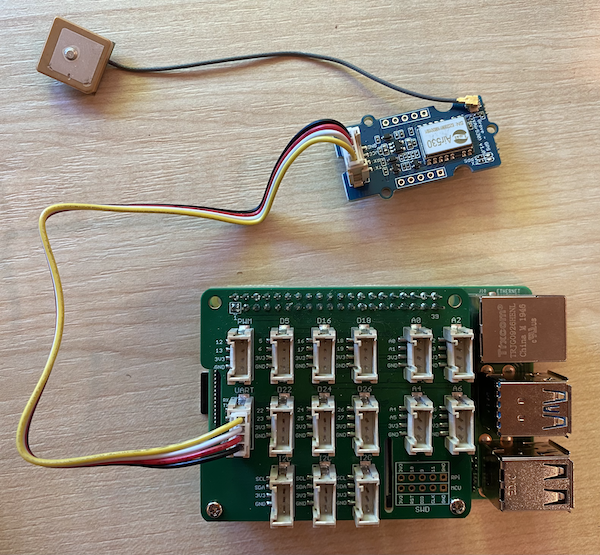
Zasuňte jeden koniec Grove kábla do konektora na GPS senzore. Kábel sa dá zasunúť iba jedným spôsobom.
-
S vypnutým Raspberry Pi pripojte druhý koniec Grove kábla do UART konektora označeného UART na Grove Base hat pripojenom k Pi. Tento konektor sa nachádza v strednom rade na strane najbližšej k SD karte, na opačnom konci od USB portov a ethernetového konektora.
-
Umiestnite GPS senzor tak, aby pripojená anténa mala výhľad na oblohu - ideálne pri otvorenom okne alebo vonku. Čím menej prekážok je medzi anténou a oblohou, tým lepší signál získate.
Programovanie GPS senzora
Raspberry Pi teraz môže byť naprogramované na používanie pripojeného GPS senzora.
Úloha - naprogramujte GPS senzor
Naprogramujte zariadenie.
-
Zapnite Pi a počkajte, kým sa spustí.
-
GPS senzor má 2 LED diódy - modrú LED, ktorá bliká pri prenose údajov, a zelenú LED, ktorá bliká každú sekundu pri prijímaní údajov zo satelitov. Uistite sa, že modrá LED bliká po zapnutí Pi. Po niekoľkých minútach začne blikať zelená LED - ak nie, možno budete musieť premiestniť anténu.
-
Spustite VS Code, buď priamo na Pi, alebo sa pripojte cez rozšírenie Remote SSH.
⚠️ Môžete sa odvolať na pokyny na nastavenie a spustenie VS Code v lekcii 1, ak je to potrebné.
-
Pri novších verziách Raspberry Pi, ktoré podporujú Bluetooth, existuje konflikt medzi sériovým portom používaným pre Bluetooth a tým, ktorý používa Grove UART port. Na vyriešenie tohto problému postupujte nasledovne:
-
Z terminálu VS Code upravte súbor
/boot/config.txtpomocounano, vstavaného textového editora terminálu, pomocou nasledujúceho príkazu:sudo nano /boot/config.txtTento súbor nemôžete upravovať vo VS Code, pretože na to potrebujete oprávnenia
sudo, teda zvýšené oprávnenia. VS Code nebeží s týmito oprávneniami. -
Pomocou kurzorových klávesov prejdite na koniec súboru, potom skopírujte nasledujúci kód a vložte ho na koniec súboru:
dtoverlay=pi3-miniuart-bt dtoverlay=pi3-disable-bt enable_uart=1Vložiť môžete pomocou bežných klávesových skratiek pre vaše zariadenie (
Ctrl+vna Windows, Linux alebo Raspberry Pi OS,Cmd+vna macOS). -
Uložte tento súbor a ukončite nano stlačením
Ctrl+x. Stlačtey, keď sa vás opýta, či chcete uložiť upravený obsah, a potom stlačteenter, aby ste potvrdili, že chcete prepísať/boot/config.txt.Ak urobíte chybu, môžete ukončiť bez uloženia a zopakovať tieto kroky.
-
Upravte súbor
/boot/cmdline.txtv nano pomocou nasledujúceho príkazu:sudo nano /boot/cmdline.txt -
Tento súbor obsahuje niekoľko dvojíc kľúč/hodnota oddelených medzerami. Odstráňte všetky dvojice kľúč/hodnota pre kľúč
console. Pravdepodobne budú vyzerať takto:console=serial0,115200 console=tty1Pomocou kurzorových klávesov prejdite na tieto položky a potom ich odstráňte pomocou kláves
delalebobackspace.Napríklad, ak váš pôvodný súbor vyzerá takto:
console=serial0,115200 console=tty1 root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwaitNová verzia bude vyzerať takto:
root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait -
Postupujte podľa vyššie uvedených krokov na uloženie tohto súboru a ukončenie nano.
-
Reštartujte svoje Pi a po reštarte sa znova pripojte vo VS Code.
-
-
Z terminálu vytvorte nový priečinok v domovskom adresári používateľa
pis názvomgps-sensor. V tomto priečinku vytvorte súbor s názvomapp.py. -
Otvorte tento priečinok vo VS Code.
-
GPS modul posiela UART údaje cez sériový port. Nainštalujte balík
pyserialcez Pip na komunikáciu so sériovým portom z vášho Python kódu:pip3 install pyserial -
Pridajte nasledujúci kód do vášho súboru
app.py:import time import serial serial = serial.Serial('/dev/ttyAMA0', 9600, timeout=1) serial.reset_input_buffer() serial.flush() def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)Tento kód importuje modul
serialz balíkapyserial. Potom sa pripojí k sériovému portu/dev/ttyAMA0- toto je adresa sériového portu, ktorý používa Grove Pi Base Hat pre svoj UART port. Následne vymaže všetky existujúce údaje z tohto sériového pripojenia.Ďalej je definovaná funkcia
print_gps_data, ktorá vypisuje riadok odovzdaný ako parameter do konzoly.Potom kód beží v nekonečnej slučke, čítajúc čo najviac riadkov textu zo sériového portu v každej iterácii. Pre každý riadok volá funkciu
print_gps_data.Po prečítaní všetkých údajov slučka spí 1 sekundu a potom to skúša znova.
-
Spustite tento kód. Uvidíte surový výstup z GPS senzora, niečo ako toto:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68Ak dostanete jednu z nasledujúcich chýb pri zastavení a opätovnom spustení vášho kódu, pridajte blok
try - exceptdo vašej while slučky.UnicodeDecodeError: 'utf-8' codec can't decode byte 0x93 in position 0: invalid start byte UnicodeDecodeError: 'utf-8' codec can't decode byte 0xf1 in position 0: invalid continuation bytewhile True: try: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data() line = serial.readline().decode('utf-8') # There's a random chance the first byte being read is part way through a character. # Read another full line and continue. except UnicodeDecodeError: line = serial.readline().decode('utf-8') time.sleep(1)
💁 Tento kód nájdete v priečinku code-gps/pi.
😀 Programovanie vášho GPS senzora bolo úspešné!
Upozornenie:
Tento dokument bol preložený pomocou služby na automatický preklad Co-op Translator. Aj keď sa snažíme o presnosť, upozorňujeme, že automatické preklady môžu obsahovať chyby alebo nepresnosti. Pôvodný dokument v jeho pôvodnom jazyku by mal byť považovaný za autoritatívny zdroj. Pre dôležité informácie odporúčame profesionálny ľudský preklad. Nezodpovedáme za akékoľvek nedorozumenia alebo nesprávne interpretácie vyplývajúce z použitia tohto prekladu.