5.2 KiB
Wykrywanie bliskości - Wio Terminal
W tej części lekcji dodasz czujnik bliskości do swojego Wio Terminal i odczytasz z niego odległość.
Sprzęt
Wio Terminal potrzebuje czujnika bliskości.
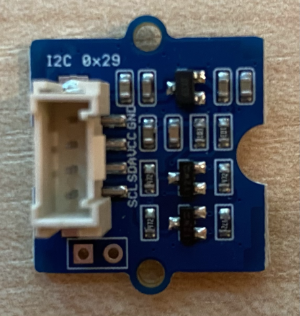
Czujnik, którego użyjesz, to Grove Time of Flight distance sensor. Ten czujnik wykorzystuje moduł laserowy do pomiaru odległości. Zakres pomiaru wynosi od 10 mm do 2000 mm (1 cm - 2 m) i w tym zakresie czujnik raportuje wartości z dużą dokładnością. Dla odległości powyżej 1000 mm czujnik zwraca wartość 8109 mm.
Dalekomierz laserowy znajduje się na tylnej stronie czujnika, po przeciwnej stronie niż gniazdo Grove.
Jest to czujnik I²C.
Podłączanie czujnika Time of Flight
Czujnik Grove Time of Flight można podłączyć do Wio Terminal.
Zadanie - podłącz czujnik Time of Flight
Podłącz czujnik Time of Flight.
-
Włóż jeden koniec kabla Grove do gniazda w czujniku Time of Flight. Kabel pasuje tylko w jedną stronę.
-
Gdy Wio Terminal jest odłączony od komputera lub innego źródła zasilania, podłącz drugi koniec kabla Grove do lewego gniazda Grove w Wio Terminal, patrząc na ekran. Jest to gniazdo najbliżej przycisku zasilania. Jest to gniazdo cyfrowe i I²C.
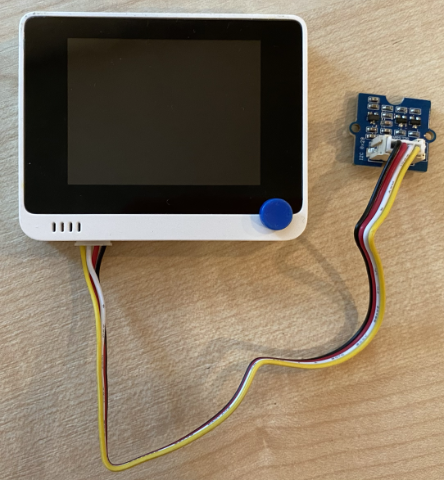
- Teraz możesz podłączyć Wio Terminal do komputera.
Programowanie czujnika Time of Flight
Wio Terminal można teraz zaprogramować do korzystania z podłączonego czujnika Time of Flight.
Zadanie - zaprogramuj czujnik Time of Flight
-
Utwórz nowy projekt Wio Terminal w PlatformIO. Nazwij ten projekt
distance-sensor. Dodaj kod w funkcjisetup, aby skonfigurować port szeregowy. -
Dodaj zależność biblioteki dla czujnika odległości Seeed Grove Time of Flight do pliku
platformio.iniprojektu:lib_deps = seeed-studio/Grove Ranging sensor - VL53L0X @ ^1.1.1 -
W pliku
main.cppdodaj poniższy kod pod istniejącymi dyrektywamiinclude, aby zadeklarować instancję klasySeeed_vl53l0xdo interakcji z czujnikiem Time of Flight:#include "Seeed_vl53l0x.h" Seeed_vl53l0x VL53L0X; -
Dodaj poniższy kod na końcu funkcji
setup, aby zainicjalizować czujnik:VL53L0X.VL53L0X_common_init(); VL53L0X.VL53L0X_high_accuracy_ranging_init(); -
W funkcji
loopodczytaj wartość z czujnika:VL53L0X_RangingMeasurementData_t RangingMeasurementData; memset(&RangingMeasurementData, 0, sizeof(VL53L0X_RangingMeasurementData_t)); VL53L0X.PerformSingleRangingMeasurement(&RangingMeasurementData);Ten kod inicjalizuje strukturę danych do odczytu danych, a następnie przekazuje ją do metody
PerformSingleRangingMeasurement, gdzie zostanie wypełniona pomiarem odległości. -
Pod tym kodem wypisz wynik pomiaru odległości, a następnie wprowadź opóźnienie 1 sekundy:
Serial.print("Distance = "); Serial.print(RangingMeasurementData.RangeMilliMeter); Serial.println(" mm"); delay(1000); -
Zbuduj, wgraj i uruchom ten kod. Będziesz mógł zobaczyć pomiary odległości w monitorze szeregowym. Umieść obiekty w pobliżu czujnika, a zobaczysz wynik pomiaru odległości:
Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmDalekomierz znajduje się na tylnej stronie czujnika, więc upewnij się, że używasz właściwej strony podczas pomiaru odległości.

💁 Kod ten znajdziesz w folderze code-proximity/wio-terminal.
😀 Twój program z czujnikiem bliskości zakończył się sukcesem!
Zastrzeżenie:
Ten dokument został przetłumaczony za pomocą usługi tłumaczenia AI Co-op Translator. Chociaż dokładamy wszelkich starań, aby zapewnić poprawność tłumaczenia, prosimy pamiętać, że automatyczne tłumaczenia mogą zawierać błędy lub nieścisłości. Oryginalny dokument w jego rodzimym języku powinien być uznawany za wiarygodne źródło. W przypadku informacji o kluczowym znaczeniu zaleca się skorzystanie z profesjonalnego tłumaczenia przez człowieka. Nie ponosimy odpowiedzialności za jakiekolwiek nieporozumienia lub błędne interpretacje wynikające z użycia tego tłumaczenia.