24 KiB
捕捉音頻 - Wio Terminal
在這部分課程中,您將撰寫程式碼來在 Wio Terminal 上捕捉音頻。音頻捕捉將由 Wio Terminal 頂部的一個按鈕控制。
將設備編程為捕捉音頻
您可以使用 C++ 程式碼從麥克風捕捉音頻。Wio Terminal 只有 192KB 的 RAM,這不足以捕捉超過幾秒鐘的音頻。它還有 4MB 的快閃記憶體,因此可以改用快閃記憶體來儲存捕捉的音頻。
內建的麥克風捕捉的是類比信號,該信號會被轉換為 Wio Terminal 可用的數位信號。在捕捉音頻時,數據需要以正確的時間間隔進行捕捉——例如,要以 16KHz 捕捉音頻,則需要每秒準確捕捉 16,000 次,且每次取樣之間的間隔相等。與其使用您的程式碼來完成這項工作,您可以使用直接記憶體存取控制器(DMAC)。這是一種電路,可以從某處捕捉信號並寫入記憶體,而不會中斷處理器上正在執行的程式碼。
✅ 在 維基百科的直接記憶體存取頁面 上閱讀更多關於 DMA 的資訊。
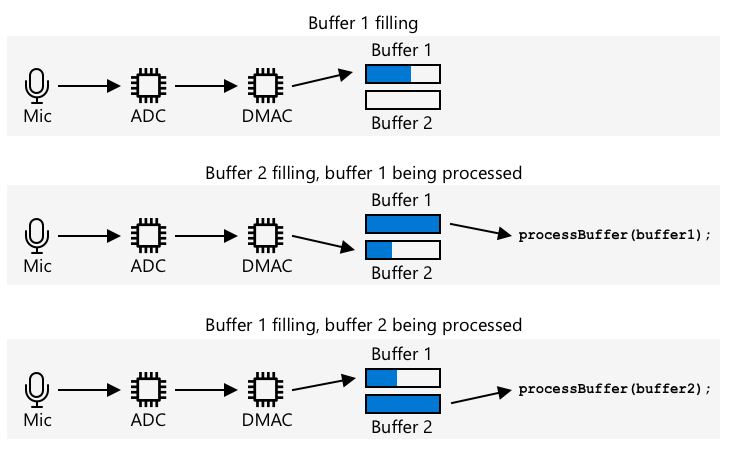
DMAC 可以以固定的間隔從 ADC 捕捉音頻,例如每秒 16,000 次以捕捉 16KHz 的音頻。它可以將捕捉到的數據寫入預先分配的記憶體緩衝區,當緩衝區滿了時,通知您的程式碼進行處理。使用這些記憶體可能會延遲音頻捕捉,但您可以設置多個緩衝區。DMAC 先寫入緩衝區 1,當緩衝區 1 滿了時,通知您的程式碼處理緩衝區 1,然後 DMAC 開始寫入緩衝區 2。當緩衝區 2 滿了時,它會通知您的程式碼,然後回到寫入緩衝區 1。這樣,只要您在填滿一個緩衝區的時間內處理完每個緩衝區,就不會丟失任何數據。
每當捕捉到一個緩衝區後,它可以被寫入快閃記憶體。快閃記憶體需要使用定義的地址進行寫入,指定寫入的位置和大小,類似於更新記憶體中的字節陣列。快閃記憶體具有粒度,這意味著擦除和寫入操作不僅需要固定大小,還需要對齊到該大小。例如,如果粒度是 4096 字節,而您請求在地址 4200 處擦除,它可能會擦除從地址 4096 到 8192 的所有數據。因此,當您將音頻數據寫入快閃記憶體時,必須以正確大小的塊進行寫入。
任務 - 配置快閃記憶體
-
使用 PlatformIO 創建一個全新的 Wio Terminal 專案。將此專案命名為
smart-timer。在setup函數中添加程式碼以配置序列埠。 -
在
platformio.ini文件中添加以下庫依賴項,以提供對快閃記憶體的訪問:lib_deps = seeed-studio/Seeed Arduino FS @ 2.1.1 seeed-studio/Seeed Arduino SFUD @ 2.0.2 -
打開
main.cpp文件,並在文件頂部添加以下包含指令以使用快閃記憶體庫:#include <sfud.h> #include <SPI.h>🎓 SFUD 代表 Serial Flash Universal Driver,是一個設計用於所有快閃記憶體晶片的庫。
-
在
setup函數中,添加以下程式碼以設置快閃儲存庫:while (!(sfud_init() == SFUD_SUCCESS)) ; sfud_qspi_fast_read_enable(sfud_get_device(SFUD_W25Q32_DEVICE_INDEX), 2);這段程式碼會循環直到 SFUD 庫初始化完成,然後啟用快速讀取。內建的快閃記憶體可以通過隊列式序列周邊介面(QSPI)訪問,這是一種 SPI 控制器,允許通過隊列以最小的處理器使用量進行連續訪問。這使得讀取和寫入快閃記憶體的速度更快。
-
在
src資料夾中創建一個名為flash_writer.h的新文件。 -
在此文件頂部添加以下內容:
#pragma once #include <Arduino.h> #include <sfud.h>這包括了一些必要的標頭文件,包括與快閃記憶體交互的 SFUD 庫的標頭文件。
-
在這個新標頭文件中定義一個名為
FlashWriter的類:class FlashWriter { public: private: }; -
在
private區域中,添加以下程式碼:byte *_sfudBuffer; size_t _sfudBufferSize; size_t _sfudBufferPos; size_t _sfudBufferWritePos; const sfud_flash *_flash;這定義了一些用於在寫入快閃記憶體之前儲存數據的緩衝區欄位。有一個字節陣列
_sfudBuffer用於寫入數據,當它滿了時,數據會被寫入快閃記憶體。_sfudBufferPos欄位儲存當前在此緩衝區中寫入的位置,_sfudBufferWritePos儲存寫入快閃記憶體的位置。_flash是一個指向要寫入的快閃記憶體的指標——某些微控制器有多個快閃記憶體晶片。 -
在
public區域中添加以下方法以初始化此類:void init() { _flash = sfud_get_device_table() + 0; _sfudBufferSize = _flash->chip.erase_gran; _sfudBuffer = new byte[_sfudBufferSize]; _sfudBufferPos = 0; _sfudBufferWritePos = 0; }這會配置 Wio Terminal 上的快閃記憶體以進行寫入,並根據快閃記憶體的粒度設置緩衝區。這是在
init方法中完成的,而不是在構造函數中,因為這需要在setup函數中設置快閃記憶體後調用。 -
在
public區域中添加以下程式碼:void writeSfudBuffer(byte b) { _sfudBuffer[_sfudBufferPos++] = b; if (_sfudBufferPos == _sfudBufferSize) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } } void writeSfudBuffer(byte *b, size_t len) { for (size_t i = 0; i < len; ++i) { writeSfudBuffer(b[i]); } } void flushSfudBuffer() { if (_sfudBufferPos > 0) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } }這段程式碼定義了將字節寫入快閃儲存系統的方法。它通過寫入與快閃記憶體大小相符的記憶體緩衝區來工作,當緩衝區滿了時,這些數據會被寫入快閃記憶體,並擦除該位置的任何現有數據。還有一個
flushSfudBuffer方法,用於寫入不完整的緩衝區,因為捕捉的數據不會是粒度大小的整數倍,因此需要寫入數據的末尾部分。💁 數據的末尾部分會寫入一些額外的無用數據,但這沒關係,因為只會讀取需要的數據。
任務 - 設置音頻捕捉
-
在
src資料夾中創建一個名為config.h的新文件。 -
在此文件頂部添加以下內容:
#pragma once #define RATE 16000 #define SAMPLE_LENGTH_SECONDS 4 #define SAMPLES RATE * SAMPLE_LENGTH_SECONDS #define BUFFER_SIZE (SAMPLES * 2) + 44 #define ADC_BUF_LEN 1600這段程式碼設置了一些音頻捕捉的常數。
常數 值 描述 RATE 16000 音頻的取樣率。16,000 即 16KHz SAMPLE_LENGTH_SECONDS 4 要捕捉的音頻長度。此處設置為 4 秒。若要錄製更長的音頻,請增加此值。 SAMPLES 64000 將捕捉的音頻取樣總數。設置為取樣率 * 秒數 BUFFER_SIZE 128044 捕捉音頻的緩衝區大小。音頻將以 WAV 文件格式捕捉,其中 44 字節為標頭,128,000 字節為音頻數據(每個取樣為 2 字節) ADC_BUF_LEN 1600 用於從 DMAC 捕捉音頻的緩衝區大小 💁 如果您發現 4 秒太短無法完成計時器請求,可以增加
SAMPLE_LENGTH_SECONDS的值,其他值將自動重新計算。 -
在
src資料夾中創建一個名為mic.h的新文件。 -
在此文件頂部添加以下內容:
#pragma once #include <Arduino.h> #include "config.h" #include "flash_writer.h"這包括了一些必要的標頭文件,包括
config.h和FlashWriter標頭文件。 -
添加以下內容以定義一個可以從麥克風捕捉音頻的
Mic類:class Mic { public: Mic() { _isRecording = false; _isRecordingReady = false; } void startRecording() { _isRecording = true; _isRecordingReady = false; } bool isRecording() { return _isRecording; } bool isRecordingReady() { return _isRecordingReady; } private: volatile bool _isRecording; volatile bool _isRecordingReady; FlashWriter _writer; }; Mic mic;目前此類只有幾個欄位,用於追蹤錄音是否已開始,以及錄音是否已準備好使用。當 DMAC 被設置後,它會持續寫入記憶體緩衝區,因此
_isRecording標誌決定這些緩衝區是否應該被處理或忽略。當捕捉到所需的 4 秒音頻時,_isRecordingReady標誌將被設置。_writer欄位用於將音頻數據儲存到快閃記憶體。然後宣告一個全域變數作為
Mic類的實例。 -
在
Mic類的private區域中添加以下程式碼:typedef struct { uint16_t btctrl; uint16_t btcnt; uint32_t srcaddr; uint32_t dstaddr; uint32_t descaddr; } dmacdescriptor; // Globals - DMA and ADC volatile dmacdescriptor _wrb[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor_section[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor __attribute__((aligned(16))); void configureDmaAdc() { // Configure DMA to sample from ADC at a regular interval (triggered by timer/counter) DMAC->BASEADDR.reg = (uint32_t)_descriptor_section; // Specify the location of the descriptors DMAC->WRBADDR.reg = (uint32_t)_wrb; // Specify the location of the write back descriptors DMAC->CTRL.reg = DMAC_CTRL_DMAENABLE | DMAC_CTRL_LVLEN(0xf); // Enable the DMAC peripheral DMAC->Channel[1].CHCTRLA.reg = DMAC_CHCTRLA_TRIGSRC(TC5_DMAC_ID_OVF) | // Set DMAC to trigger on TC5 timer overflow DMAC_CHCTRLA_TRIGACT_BURST; // DMAC burst transfer _descriptor.descaddr = (uint32_t)&_descriptor_section[1]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_0 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_0 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[0], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section _descriptor.descaddr = (uint32_t)&_descriptor_section[0]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_1 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_1 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[1], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section // Configure NVIC NVIC_SetPriority(DMAC_1_IRQn, 0); // Set the Nested Vector Interrupt Controller (NVIC) priority for DMAC1 to 0 (highest) NVIC_EnableIRQ(DMAC_1_IRQn); // Connect DMAC1 to Nested Vector Interrupt Controller (NVIC) // Activate the suspend (SUSP) interrupt on DMAC channel 1 DMAC->Channel[1].CHINTENSET.reg = DMAC_CHINTENSET_SUSP; // Configure ADC ADC1->INPUTCTRL.bit.MUXPOS = ADC_INPUTCTRL_MUXPOS_AIN12_Val; // Set the analog input to ADC0/AIN2 (PB08 - A4 on Metro M4) while (ADC1->SYNCBUSY.bit.INPUTCTRL) ; // Wait for synchronization ADC1->SAMPCTRL.bit.SAMPLEN = 0x00; // Set max Sampling Time Length to half divided ADC clock pulse (2.66us) while (ADC1->SYNCBUSY.bit.SAMPCTRL) ; // Wait for synchronization ADC1->CTRLA.reg = ADC_CTRLA_PRESCALER_DIV128; // Divide Clock ADC GCLK by 128 (48MHz/128 = 375kHz) ADC1->CTRLB.reg = ADC_CTRLB_RESSEL_12BIT | // Set ADC resolution to 12 bits ADC_CTRLB_FREERUN; // Set ADC to free run mode while (ADC1->SYNCBUSY.bit.CTRLB) ; // Wait for synchronization ADC1->CTRLA.bit.ENABLE = 1; // Enable the ADC while (ADC1->SYNCBUSY.bit.ENABLE) ; // Wait for synchronization ADC1->SWTRIG.bit.START = 1; // Initiate a software trigger to start an ADC conversion while (ADC1->SYNCBUSY.bit.SWTRIG) ; // Wait for synchronization // Enable DMA channel 1 DMAC->Channel[1].CHCTRLA.bit.ENABLE = 1; // Configure Timer/Counter 5 GCLK->PCHCTRL[TC5_GCLK_ID].reg = GCLK_PCHCTRL_CHEN | // Enable peripheral channel for TC5 GCLK_PCHCTRL_GEN_GCLK1; // Connect generic clock 0 at 48MHz TC5->COUNT16.WAVE.reg = TC_WAVE_WAVEGEN_MFRQ; // Set TC5 to Match Frequency (MFRQ) mode TC5->COUNT16.CC[0].reg = 3000 - 1; // Set the trigger to 16 kHz: (4Mhz / 16000) - 1 while (TC5->COUNT16.SYNCBUSY.bit.CC0) ; // Wait for synchronization // Start Timer/Counter 5 TC5->COUNT16.CTRLA.bit.ENABLE = 1; // Enable the TC5 timer while (TC5->COUNT16.SYNCBUSY.bit.ENABLE) ; // Wait for synchronization } uint16_t _adc_buf_0[ADC_BUF_LEN]; uint16_t _adc_buf_1[ADC_BUF_LEN];這段程式碼定義了一個
configureDmaAdc方法,用於配置 DMAC,將其連接到 ADC,並設置為填充兩個不同的交替緩衝區_adc_buf_0和_adc_buf_1。💁 微控制器開發的一個缺點是與硬體交互所需的程式碼非常複雜,因為您的程式碼在非常低的層級上直接與硬體交互。這段程式碼比您為單板電腦或桌面電腦撰寫的程式碼更複雜,因為沒有作業系統提供幫助。雖然有一些庫可以簡化這個過程,但仍然存在很多複雜性。
-
在此程式碼下方添加以下程式碼:
// WAV files have a header. This struct defines that header struct wavFileHeader { char riff[4]; /* "RIFF" */ long flength; /* file length in bytes */ char wave[4]; /* "WAVE" */ char fmt[4]; /* "fmt " */ long chunk_size; /* size of FMT chunk in bytes (usually 16) */ short format_tag; /* 1=PCM, 257=Mu-Law, 258=A-Law, 259=ADPCM */ short num_chans; /* 1=mono, 2=stereo */ long srate; /* Sampling rate in samples per second */ long bytes_per_sec; /* bytes per second = srate*bytes_per_samp */ short bytes_per_samp; /* 2=16-bit mono, 4=16-bit stereo */ short bits_per_samp; /* Number of bits per sample */ char data[4]; /* "data" */ long dlength; /* data length in bytes (filelength - 44) */ }; void initBufferHeader() { wavFileHeader wavh; strncpy(wavh.riff, "RIFF", 4); strncpy(wavh.wave, "WAVE", 4); strncpy(wavh.fmt, "fmt ", 4); strncpy(wavh.data, "data", 4); wavh.chunk_size = 16; wavh.format_tag = 1; // PCM wavh.num_chans = 1; // mono wavh.srate = RATE; wavh.bytes_per_sec = (RATE * 1 * 16 * 1) / 8; wavh.bytes_per_samp = 2; wavh.bits_per_samp = 16; wavh.dlength = RATE * 2 * 1 * 16 / 2; wavh.flength = wavh.dlength + 44; _writer.writeSfudBuffer((byte *)&wavh, 44); }這段程式碼將 WAV 標頭定義為一個佔用 44 字節記憶體的結構。它將音頻文件的取樣率、大小和通道數等詳細資訊寫入標頭,然後將該標頭寫入快閃記憶體。
-
在此程式碼下方添加以下內容以宣告一個方法,該方法在音頻緩衝區準備好處理時被調用:
void audioCallback(uint16_t *buf, uint32_t buf_len) { static uint32_t idx = 44; if (_isRecording) { for (uint32_t i = 0; i < buf_len; i++) { int16_t audio_value = ((int16_t)buf[i] - 2048) * 16; _writer.writeSfudBuffer(audio_value & 0xFF); _writer.writeSfudBuffer((audio_value >> 8) & 0xFF); } idx += buf_len; if (idx >= BUFFER_SIZE) { _writer.flushSfudBuffer(); idx = 44; _isRecording = false; _isRecordingReady = true; } } }音頻緩衝區是包含來自 ADC 的音頻的 16 位整數陣列。ADC 返回的是 12 位無符號值(0-1023),因此需要將其轉換為 16 位有符號值,然後轉換為 2 個字節以作為原始二進位數據儲存。
這些字節被寫入快閃記憶體緩衝區。寫入從索引 44 開始——這是 WAV 文件標頭的 44 字節偏移量。一旦捕捉到所需長度的所有字節,剩餘的數據將被寫入快閃記憶體。
-
在
Mic類的public區域中添加以下程式碼:void dmaHandler() { static uint8_t count = 0; if (DMAC->Channel[1].CHINTFLAG.bit.SUSP) { DMAC->Channel[1].CHCTRLB.reg = DMAC_CHCTRLB_CMD_RESUME; DMAC->Channel[1].CHINTFLAG.bit.SUSP = 1; if (count) { audioCallback(_adc_buf_0, ADC_BUF_LEN); } else { audioCallback(_adc_buf_1, ADC_BUF_LEN); } count = (count + 1) % 2; } }這段程式碼將由 DMAC 調用,以通知您的程式碼處理緩衝區。它檢查是否有數據需要處理,並調用
audioCallback方法處理相關緩衝區。 -
在類外部,在
Mic mic;宣告之後添加以下程式碼:void DMAC_1_Handler() { mic.dmaHandler(); }DMAC_1_Handler將由 DMAC 調用,當緩衝區準備好處理時。此函數通過名稱找到,因此只需存在即可被調用。 -
在
Mic類的public區域中添加以下兩個方法:void init() { analogReference(AR_INTERNAL2V23); _writer.init(); initBufferHeader(); configureDmaAdc(); } void reset() { _isRecordingReady = false; _isRecording = false; _writer.reset(); initBufferHeader(); }init方法包含初始化Mic類的程式碼。此方法設置麥克風引腳的正確電壓,設置快閃記憶體寫入器,寫入 WAV 文件標頭,並配置 DMAC。reset方法在音頻捕捉並使用後重置快閃記憶體並重新寫入標頭。
任務 - 捕捉音頻
-
在
main.cpp文件中,添加一個包含mic.h標頭文件的指令:#include "mic.h" -
在
setup函數中,初始化 C 按鈕。當按下此按鈕時,將開始音頻捕捉,並持續 4 秒:pinMode(WIO_KEY_C, INPUT_PULLUP); -
在此程式碼下方,初始化麥克風,然後在控制台中打印音頻已準備好捕捉的訊息:
mic.init(); Serial.println("Ready."); -
在
loop函數上方,定義一個函數來處理捕捉的音頻。目前此函數不執行任何操作,但稍後在本課程中,它將用於將語音轉換為文字:void processAudio() { } -
在
loop函數中添加以下程式碼:void loop() { if (digitalRead(WIO_KEY_C) == LOW && !mic.isRecording()) { Serial.println("Starting recording..."); mic.startRecording(); } if (!mic.isRecording() && mic.isRecordingReady()) { Serial.println("Finished recording"); processAudio(); mic.reset(); } }這段程式碼檢查 C 按鈕,如果按下且錄音尚未開始,則將
Mic類的_isRecording欄位設置為 true。這將導致Mic類的audioCallback方法儲存音頻,直到捕捉到 4 秒的音頻。當捕捉到 4 秒的音頻後,_isRecording欄位將設置為 false,_isRecordingReady欄位將設置為 true。然後在loop函數中檢查此標誌,當為 true 時,調用processAudio函數,然後重置Mic類。 -
編譯此程式碼,將其上傳到您的 Wio Terminal,並通過序列監視器進行測試。按下 C 按鈕(左側靠近電源開關的按鈕),然後說話。將捕捉 4 秒的音頻。
--- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time --- More details at http://bit.ly/pio-monitor-filters --- Miniterm on /dev/cu.usbmodem1101 9600,8,N,1 --- --- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- Ready. Starting recording... Finished recording
💁 您可以在 code-record/wio-terminal 資料夾中找到此程式碼。 😀 你的音訊錄製程式大功告成!
免責聲明:
本文件已使用 AI 翻譯服務 Co-op Translator 進行翻譯。儘管我們努力確保翻譯的準確性,但請注意,自動翻譯可能包含錯誤或不準確之處。原始文件的母語版本應被視為權威來源。對於關鍵信息,建議使用專業人工翻譯。我們對因使用此翻譯而引起的任何誤解或錯誤解釋不承擔責任。