5.8 KiB
讀取 GPS 數據 - Wio Terminal
在本課程中,您將為 Wio Terminal 添加一個 GPS 感測器,並從中讀取數據。
硬體
Wio Terminal 需要一個 GPS 感測器。
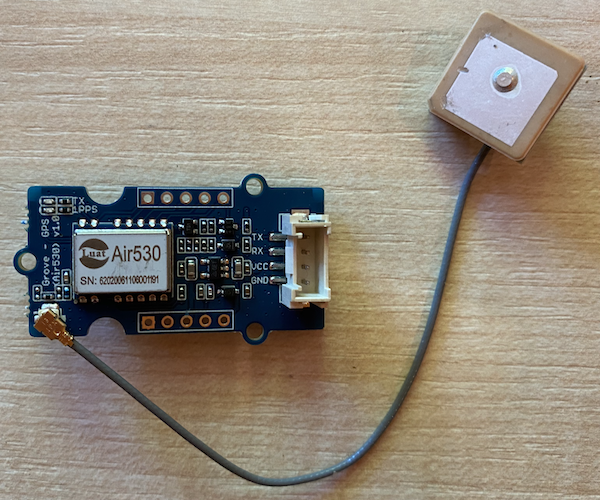
您將使用的感測器是 Grove GPS Air530 感測器。這款感測器可以連接到多個 GPS 系統,提供快速且準確的定位。感測器由兩部分組成——感測器的核心電子元件,以及通過細線連接的外部天線,用於接收來自衛星的無線電波。
這是一個 UART 感測器,因此會通過 UART 傳輸 GPS 數據。
連接 GPS 感測器
Grove GPS 感測器可以連接到 Wio Terminal。
任務 - 連接 GPS 感測器
連接 GPS 感測器。
-
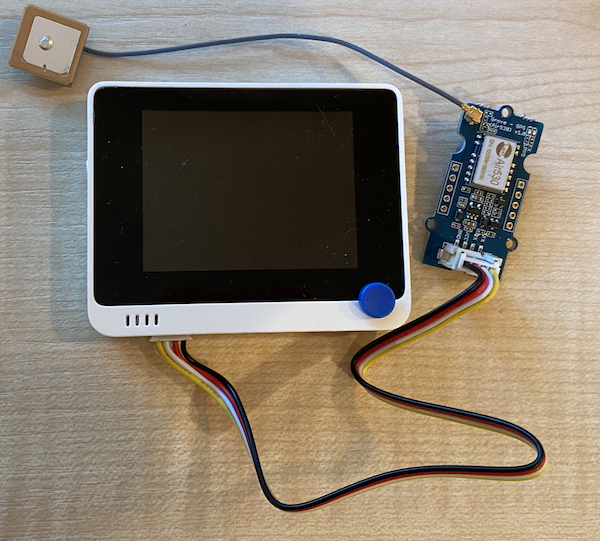
將 Grove 線纜的一端插入 GPS 感測器上的插槽。它只能以一種方式插入。
-
在 Wio Terminal 未連接到電腦或其他電源的情況下,將 Grove 線纜的另一端連接到 Wio Terminal 左側的 Grove 插槽(面向螢幕時)。這是靠近電源按鈕的插槽。
-
將 GPS 感測器放置在附帶天線可以看到天空的位置——理想情況下靠近窗戶或在戶外。天線周圍沒有障礙物時,信號會更清晰。
-
現在可以將 Wio Terminal 連接到您的電腦。
-
GPS 感測器有兩個 LED 指示燈——藍色 LED 在傳輸數據時閃爍,綠色 LED 在接收到衛星數據時每秒閃爍一次。確保在啟動 Wio Terminal 時藍色 LED 閃爍。幾分鐘後,綠色 LED 會開始閃爍——如果沒有,您可能需要重新調整天線的位置。
編程 GPS 感測器
現在可以為 Wio Terminal 編寫程式碼以使用連接的 GPS 感測器。
任務 - 編程 GPS 感測器
為設備編寫程式碼。
-
使用 PlatformIO 創建一個全新的 Wio Terminal 專案,命名為
gps-sensor。在setup函數中添加程式碼以配置序列埠。 -
在
main.cpp文件的頂部添加以下 include 指令。這會包含一個用於配置左側 Grove 埠為 UART 的標頭檔案。#include <wiring_private.h> -
在此之下,添加以下程式碼行以聲明一個與 UART 埠連接的序列埠:
static Uart Serial3(&sercom3, PIN_WIRE_SCL, PIN_WIRE_SDA, SERCOM_RX_PAD_1, UART_TX_PAD_0); -
您需要添加一些程式碼來將一些內部信號處理程序重定向到這個序列埠。在
Serial3聲明之下添加以下程式碼:void SERCOM3_0_Handler() { Serial3.IrqHandler(); } void SERCOM3_1_Handler() { Serial3.IrqHandler(); } void SERCOM3_2_Handler() { Serial3.IrqHandler(); } void SERCOM3_3_Handler() { Serial3.IrqHandler(); } -
在
setup函數中,在配置Serial埠的程式碼之下,使用以下程式碼配置 UART 序列埠:Serial3.begin(9600); while (!Serial3) ; // Wait for Serial3 to be ready delay(1000); -
在
setup函數中的這段程式碼之下,添加以下程式碼以將 Grove 引腳連接到序列埠:pinPeripheral(PIN_WIRE_SCL, PIO_SERCOM_ALT); -
在
loop函數之前,添加以下函數以將 GPS 數據發送到序列監視器:void printGPSData() { Serial.println(Serial3.readStringUntil('\n')); } -
在
loop函數中,添加以下程式碼以從 UART 序列埠讀取數據並將輸出打印到序列監視器:while (Serial3.available() > 0) { printGPSData(); } delay(1000);此程式碼從 UART 序列埠讀取數據。
readStringUntil函數會讀取直到終止符(在本例中是一個換行符)。這將讀取整個 NMEA 語句(NMEA 語句以換行符結尾)。只要可以從 UART 序列埠讀取數據,就會讀取並通過printGPSData函數發送到序列監視器。一旦無法再讀取數據,loop會延遲 1 秒(1,000 毫秒)。 -
編譯並上傳程式碼到 Wio Terminal。
-
上傳完成後,您可以使用序列監視器查看 GPS 數據。
> Executing task: platformio device monitor < --- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time --- More details at http://bit.ly/pio-monitor-filters --- Miniterm on /dev/cu.usbmodem1201 9600,8,N,1 --- --- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68
💁 您可以在 code-gps/wio-terminal 資料夾中找到這段程式碼。
😀 恭喜!您的 GPS 感測器程式成功運行!
免責聲明:
本文件已使用 AI 翻譯服務 Co-op Translator 進行翻譯。儘管我們努力確保翻譯的準確性,但請注意,自動翻譯可能包含錯誤或不準確之處。原始文件的母語版本應被視為權威來源。對於關鍵信息,建議使用專業人工翻譯。我們對因使用此翻譯而引起的任何誤解或錯誤解釋不承擔責任。