4.8 KiB
Tunnista läheisyys - Virtuaalinen IoT-laitteisto
Tässä oppitunnin osassa lisäät läheisyyssensorin virtuaaliseen IoT-laitteeseesi ja luet sen mittaamia etäisyyksiä.
Laitteisto
Virtuaalinen IoT-laite käyttää simuloitua etäisyyssensoria.
Fyysisessä IoT-laitteessa käyttäisit sensoria, jossa on lasermittausmoduuli etäisyyden havaitsemiseksi.
Lisää etäisyyssensori CounterFitiin
Jotta voit käyttää virtuaalista etäisyyssensoria, sinun täytyy lisätä sellainen CounterFit-sovellukseen.
Tehtävä - lisää etäisyyssensori CounterFitiin
Lisää etäisyyssensori CounterFit-sovellukseen.
-
Avaa
fruit-quality-detector-koodi VS Codessa ja varmista, että virtuaaliympäristö on aktivoitu. -
Asenna lisäpaketti Pipin kautta, jotta voit asentaa CounterFit-shimin, joka simuloi rpi-vl53l0x Pip -pakettia. Tämä Python-paketti on suunniteltu toimimaan VL53L0X time-of-flight -etäisyyssensorin kanssa. Varmista, että asennat tämän terminaalista, jossa virtuaaliympäristö on aktivoitu.
pip install counterfit-shims-rpi-vl53l0x -
Varmista, että CounterFit-verkkosovellus on käynnissä.
-
Luo etäisyyssensori:
-
Sensors-paneelin Create sensor -laatikossa avaa Sensor type -valikko ja valitse Distance.
-
Jätä Units arvoksi
Millimeter. -
Tämä sensori on I²C-sensori, joten aseta osoitteeksi
0x29. Jos käyttäisit fyysistä VL53L0X-sensoria, sen osoite olisi kovakoodattu tähän arvoon. -
Valitse Add-painike luodaksesi etäisyyssensorin.
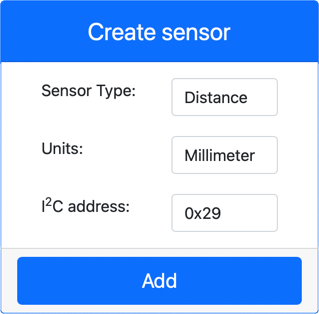
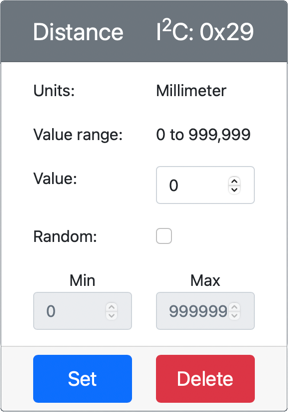
Etäisyyssensori luodaan ja se näkyy sensorilistassa.
-
Ohjelmoi etäisyyssensori
Virtuaalinen IoT-laite voidaan nyt ohjelmoida käyttämään simuloitua etäisyyssensoria.
Tehtävä - ohjelmoi time-of-flight -sensori
-
Luo uusi tiedosto
fruit-quality-detector-projektissa nimeltädistance-sensor.py.💁 Helppo tapa simuloida useita IoT-laitteita on tehdä jokainen eri Python-tiedostossa ja ajaa ne samanaikaisesti.
-
Aloita yhteys CounterFitiin seuraavalla koodilla:
from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Lisää tämän alle seuraava koodi:
import time from counterfit_shims_rpi_vl53l0x.vl53l0x import VL53L0XTämä tuo käyttöön VL53L0X time-of-flight -sensorin kirjastoshimin.
-
Lisää tämän alle seuraava koodi sensorin käyttämiseksi:
distance_sensor = VL53L0X() distance_sensor.begin()Tämä koodi määrittelee etäisyyssensorin ja käynnistää sen.
-
Lopuksi lisää loputon silmukka etäisyyksien lukemiseen:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)Tämä koodi odottaa, että sensorilta on saatavilla arvo, ja tulostaa sen konsoliin.
-
Aja tämä koodi.
💁 Muista, että tämä tiedosto on nimeltään
distance-sensor.py! Varmista, että ajat sen Pythonilla, etapp.py:llä. -
Näet etäisyysmittauksia konsolissa. Muuta arvoa CounterFitissä nähdäksesi sen muuttuvan tai käytä satunnaisia arvoja.
(.venv) ➜ fruit-quality-detector python distance-sensor.py Distance = 37 mm Distance = 42 mm Distance = 29 mm
💁 Löydät tämän koodin code-proximity/virtual-iot-device -kansiosta.
😀 Onnittelut, läheisyyssensorin ohjelmointi onnistui!
Vastuuvapauslauseke:
Tämä asiakirja on käännetty käyttämällä tekoälypohjaista käännöspalvelua Co-op Translator. Vaikka pyrimme tarkkuuteen, huomioithan, että automaattiset käännökset voivat sisältää virheitä tai epätarkkuuksia. Alkuperäistä asiakirjaa sen alkuperäisellä kielellä tulisi pitää ensisijaisena lähteenä. Kriittisen tiedon osalta suositellaan ammattimaista ihmiskäännöstä. Emme ole vastuussa väärinkäsityksistä tai virhetulkinnoista, jotka johtuvat tämän käännöksen käytöstä.