19 KiB
Tallenna kuva - Wio Terminal
Tässä oppitunnin osassa lisäät kameran Wio Terminaliin ja otat kuvia sillä.
Laitteisto
Wio Terminal tarvitsee kameran.
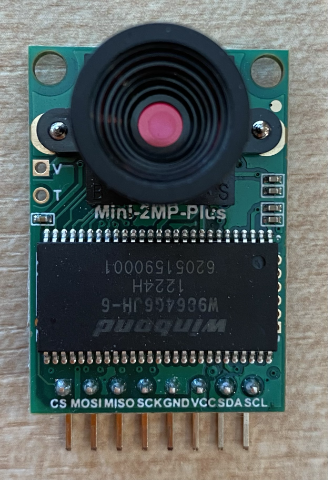
Kamera, jota käytät, on ArduCam Mini 2MP Plus. Tämä on 2 megapikselin kamera, joka perustuu OV2640-kuvakennoon. Se kommunikoi SPI-liitännän kautta kuvien ottamiseksi ja käyttää I2C:tä anturin konfigurointiin.
Yhdistä kamera
ArduCam ei sisällä Grove-liitintä, vaan se yhdistetään sekä SPI- että I2C-väylään GPIO-pinnien kautta Wio Terminalissa.
Tehtävä - yhdistä kamera
Yhdistä kamera.
-
ArduCamin pohjassa olevat pinnit täytyy yhdistää Wio Terminalin GPIO-pinneihin. Jotta oikeat pinnit löytyvät helpommin, kiinnitä Wio Terminalin mukana tuleva GPIO-tarralappu pinneihin:

-
Käytä hyppylankoja ja tee seuraavat liitännät:
ArduCAM-pinni Wio Terminal -pinni Kuvaus CS 24 (SPI_CS) SPI Chip Select MOSI 19 (SPI_MOSI) SPI-ohjaimen ulostulo, laitteen sisääntulo MISO 21 (SPI_MISO) SPI-ohjaimen sisääntulo, laitteen ulostulo SCK 23 (SPI_SCLK) SPI-sarjakello GND 6 (GND) Maa - 0V VCC 4 (5V) 5V virtalähde SDA 3 (I2C1_SDA) I2C-sarjadata SCL 5 (I2C1_SCL) I2C-sarjakello 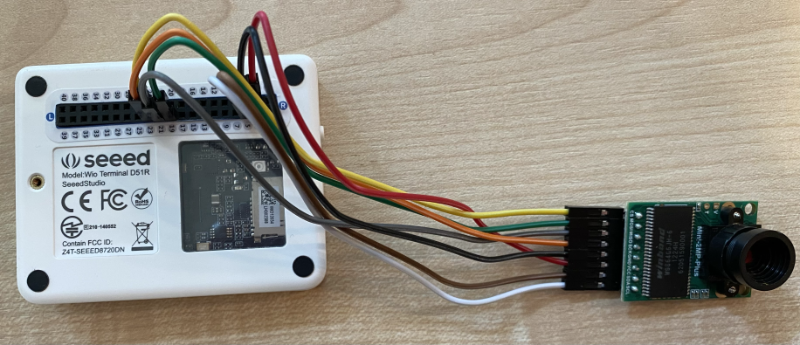
GND- ja VCC-liitännät tarjoavat 5V virtalähteen ArduCamille. Se toimii 5V:lla, toisin kuin Grove-anturit, jotka toimivat 3V:lla. Tämä virta tulee suoraan USB-C-liitännästä, joka syöttää virtaa laitteelle.
💁 SPI-liitännässä ArduCamin pinni-merkinnät ja Wio Terminalin pinni-nimet, joita käytetään koodissa, käyttävät edelleen vanhaa nimeämiskäytäntöä. Tämän oppitunnin ohjeet käyttävät uutta nimeämiskäytäntöä, paitsi silloin kun pinni-nimiä käytetään koodissa.
-
Voit nyt yhdistää Wio Terminalin tietokoneeseesi.
Ohjelmoi laite yhdistämään kameraan
Wio Terminal voidaan nyt ohjelmoida käyttämään liitettyä ArduCAM-kameraa.
Tehtävä - ohjelmoi laite yhdistämään kameraan
-
Luo uusi Wio Terminal -projekti PlatformIO:ssa. Nimeä projekti
fruit-quality-detector. Lisää koodiasetup-funktioon sarjaportin konfiguroimiseksi. -
Lisää koodia yhdistääksesi WiFiin, ja tallenna WiFi-tunnistetiedot tiedostoon nimeltä
config.h. Älä unohda lisätä tarvittavia kirjastojaplatformio.ini-tiedostoon. -
ArduCam-kirjasto ei ole saatavilla Arduino-kirjastona, joka voidaan asentaa
platformio.ini-tiedostosta. Sen sijaan se täytyy asentaa lähdekoodista heidän GitHub-sivultaan. Voit tehdä tämän joko:- Kloonaamalla repositorion osoitteesta https://github.com/ArduCAM/Arduino.git
- Siirtymällä GitHub-repositorioon osoitteessa github.com/ArduCAM/Arduino ja lataamalla koodin zip-tiedostona Code-painikkeesta
-
Tarvitset vain
ArduCAM-kansion tästä koodista. Kopioi koko kansio projektisilib-kansioon.⚠️ Koko kansio täytyy kopioida, jotta koodi on
lib/ArduCam. Älä kopioi vainArduCam-kansion sisältöälib-kansioon, vaan kopioi koko kansio. -
ArduCam-kirjastokoodi toimii useille kameratyypeille. Käytettävä kameratyyppi konfiguroidaan kääntäjän lipuilla - tämä pitää rakennetun kirjaston mahdollisimman pienenä poistamalla koodin kameroille, joita et käytä. Konfiguroidaksesi kirjaston OV2640-kameralle, lisää seuraava
platformio.ini-tiedoston loppuun:build_flags = -DARDUCAM_SHIELD_V2 -DOV2640_CAMTämä asettaa kaksi kääntäjän lippua:
ARDUCAM_SHIELD_V2kertoo kirjastolle, että kamera on Arduino-laudalla, joka tunnetaan nimellä shield.OV2640_CAMkertoo kirjastolle, että mukaan otetaan vain OV2640-kameran koodi.
-
Lisää otsikkotiedosto
src-kansioon nimeltäcamera.h. Tämä sisältää koodin kameran kanssa kommunikointiin. Lisää seuraava koodi tähän tiedostoon:#pragma once #include <ArduCAM.h> #include <Wire.h> class Camera { public: Camera(int format, int image_size) : _arducam(OV2640, PIN_SPI_SS) { _format = format; _image_size = image_size; } bool init() { // Reset the CPLD _arducam.write_reg(0x07, 0x80); delay(100); _arducam.write_reg(0x07, 0x00); delay(100); // Check if the ArduCAM SPI bus is OK _arducam.write_reg(ARDUCHIP_TEST1, 0x55); if (_arducam.read_reg(ARDUCHIP_TEST1) != 0x55) { return false; } // Change MCU mode _arducam.set_mode(MCU2LCD_MODE); uint8_t vid, pid; // Check if the camera module type is OV2640 _arducam.wrSensorReg8_8(0xff, 0x01); _arducam.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid); _arducam.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid); if ((vid != 0x26) && ((pid != 0x41) || (pid != 0x42))) { return false; } _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); _arducam.OV2640_set_Light_Mode(Auto); _arducam.OV2640_set_Special_effects(Normal); delay(1000); return true; } void startCapture() { _arducam.flush_fifo(); _arducam.clear_fifo_flag(); _arducam.start_capture(); } bool captureReady() { return _arducam.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK); } bool readImageToBuffer(byte **buffer, uint32_t &buffer_length) { if (!captureReady()) return false; // Get the image file length uint32_t length = _arducam.read_fifo_length(); buffer_length = length; if (length >= MAX_FIFO_SIZE) { return false; } if (length == 0) { return false; } // create the buffer byte *buf = new byte[length]; uint8_t temp = 0, temp_last = 0; int i = 0; uint32_t buffer_pos = 0; bool is_header = false; _arducam.CS_LOW(); _arducam.set_fifo_burst(); while (length--) { temp_last = temp; temp = SPI.transfer(0x00); //Read JPEG data from FIFO if ((temp == 0xD9) && (temp_last == 0xFF)) //If find the end ,break while, { buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_HIGH(); } if (is_header == true) { //Write image data to buffer if not full if (i < 256) { buf[buffer_pos] = temp; buffer_pos++; i++; } else { _arducam.CS_HIGH(); i = 0; buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_LOW(); _arducam.set_fifo_burst(); } } else if ((temp == 0xD8) & (temp_last == 0xFF)) { is_header = true; buf[buffer_pos] = temp_last; buffer_pos++; i++; buf[buffer_pos] = temp; buffer_pos++; i++; } } _arducam.clear_fifo_flag(); _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); // return the buffer *buffer = buf; } private: ArduCAM _arducam; int _format; int _image_size; };Tämä on matalan tason koodi, joka konfiguroi kameran ArduCam-kirjastojen avulla ja hakee kuvat tarvittaessa SPI-väylän kautta. Tämä koodi on hyvin spesifinen ArduCamille, joten sinun ei tarvitse huolehtia sen toiminnasta tässä vaiheessa.
-
Lisää
main.cpp-tiedostoon seuraava koodi muideninclude-lausuntojen alle sisällyttääksesi uuden tiedoston ja luodaksesi kameraluokan instanssin:#include "camera.h" Camera camera = Camera(JPEG, OV2640_640x480);Tämä luo
Camera-instanssin, joka tallentaa kuvat JPEG-muodossa resoluutiolla 640x480. Vaikka suurempia resoluutioita tuetaan (jopa 3280x2464), kuvien luokittelu toimii paljon pienemmillä kuvilla (227x227), joten ei ole tarpeen ottaa ja lähettää suurempia kuvia. -
Lisää seuraava koodi tämän alle määrittääksesi funktion kameran asettamiseen:
void setupCamera() { pinMode(PIN_SPI_SS, OUTPUT); digitalWrite(PIN_SPI_SS, HIGH); Wire.begin(); SPI.begin(); if (!camera.init()) { Serial.println("Error setting up the camera!"); } }Tämä
setupCamera-funktio aloittaa konfiguroimalla SPI Chip Select -pinnin (PIN_SPI_SS) korkeaksi, tehden Wio Terminalista SPI-ohjaimen. Se käynnistää sitten I2C- ja SPI-väylät. Lopuksi se alustaa kameraluokan, joka konfiguroi kameran anturiasetukset ja varmistaa, että kaikki on kytketty oikein. -
Kutsu tätä funktiota
setup-funktion lopussa:setupCamera(); -
Rakenna ja lataa tämä koodi ja tarkista sarjaportin monitorin tuloste. Jos näet
Error setting up the camera!, tarkista johdotukset varmistaaksesi, että kaikki kaapelit yhdistävät oikeat ArduCamin pinnit oikeisiin GPIO-pinneihin Wio Terminalissa ja että kaikki hyppylangat ovat kunnolla kiinni.
Ota kuva
Wio Terminal voidaan nyt ohjelmoida ottamaan kuva, kun painiketta painetaan.
Tehtävä - ota kuva
-
Mikro-ohjaimet suorittavat koodiasi jatkuvasti, joten ei ole helppoa käynnistää jotain, kuten valokuvan ottamista, ilman reaktiota anturiin. Wio Terminalissa on painikkeita, joten kamera voidaan asettaa käynnistymään yhdellä painikkeista. Lisää seuraava koodi
setup-funktion loppuun konfiguroidaksesi C-painikkeen (yksi kolmesta yläpainikkeesta, lähimpänä virtakytkintä).
pinMode(WIO_KEY_C, INPUT_PULLUP);INPUT_PULLUP-tila kääntää syötteen. Esimerkiksi normaalisti painike lähettäisi matalan signaalin, kun sitä ei paineta, ja korkean signaalin, kun sitä painetaan. Kun tila onINPUT_PULLUP, se lähettää korkean signaalin, kun sitä ei paineta, ja matalan signaalin, kun sitä painetaan. -
Lisää tyhjä funktio reagoimaan painikkeen painallukseen ennen
loop-funktiota:void buttonPressed() { } -
Kutsu tätä funktiota
loop-metodissa, kun painiketta painetaan:void loop() { if (digitalRead(WIO_KEY_C) == LOW) { buttonPressed(); delay(2000); } delay(200); }Tämä tarkistaa, onko painiketta painettu. Jos painiketta painetaan, kutsutaan
buttonPressed-funktiota, ja silmukka viivästyy 2 sekuntia. Tämä antaa aikaa painikkeen vapauttamiselle, jotta pitkä painallus ei rekisteröidy kahdesti.💁 Wio Terminalin painike on asetettu
INPUT_PULLUP-tilaan, joten se lähettää korkean signaalin, kun sitä ei paineta, ja matalan signaalin, kun sitä painetaan. -
Lisää seuraava koodi
buttonPressed-funktioon:camera.startCapture(); while (!camera.captureReady()) delay(100); Serial.println("Image captured"); byte *buffer; uint32_t length; if (camera.readImageToBuffer(&buffer, length)) { Serial.print("Image read to buffer with length "); Serial.println(length); delete(buffer); }Tämä koodi aloittaa kameran kuvauksen kutsumalla
startCapture. Kameran laitteisto ei toimi palauttamalla dataa pyynnön yhteydessä, vaan lähetät käskyn aloittaa kuvaus, ja kamera työskentelee taustalla kuvan ottamiseksi, sen muuntamiseksi JPEG-muotoon ja sen tallentamiseksi kameran paikalliseen puskuriin.captureReady-kutsu tarkistaa, onko kuvan ottaminen valmis.Kun kuvaus on valmis, kuvatiedot kopioidaan kameran puskurista paikalliseen puskuriin (tavujen taulukkoon)
readImageToBuffer-kutsulla. Puskurin pituus lähetetään sitten sarjaportin monitoriin. -
Rakenna ja lataa tämä koodi ja tarkista sarjaportin monitorin tuloste. Joka kerta, kun painat C-painiketta, kuva otetaan ja näet kuvan koon sarjaportin monitorissa.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 9224 Image captured Image read to buffer with length 11272Eri kuvat ovat eri kokoisia. Ne pakataan JPEG-muotoon, ja JPEG-tiedoston koko tietylle resoluutiolle riippuu siitä, mitä kuvassa on.
💁 Löydät tämän koodin code-camera/wio-terminal -kansiosta.
😀 Olet onnistuneesti ottanut kuvia Wio Terminalilla.
Valinnainen - varmista kameran kuvat SD-kortilla
Helpoin tapa nähdä kameran ottamat kuvat on kirjoittaa ne SD-kortille Wio Terminalissa ja tarkastella niitä tietokoneellasi. Tee tämä vaihe, jos sinulla on ylimääräinen microSD-kortti ja microSD-korttipaikka tietokoneessasi tai adapteri.
Wio Terminal tukee vain enintään 16GB:n microSD-kortteja. Jos sinulla on suurempi SD-kortti, se ei toimi.
Tehtävä - varmista kameran kuvat SD-kortilla
-
Alusta microSD-kortti FAT32- tai exFAT-muotoon käyttämällä tietokoneesi sovelluksia (Disk Utility macOS:ssä, File Explorer Windowsissa tai komentorivityökaluja Linuxissa).
-
Aseta microSD-kortti virtakytkimen alapuolella olevaan korttipaikkaan. Varmista, että se menee kokonaan sisään, kunnes se napsahtaa ja pysyy paikallaan. Saatat joutua työntämään sitä kynnen tai ohuen työkalun avulla.
-
Lisää seuraavat
include-lausunnotmain.cpp-tiedoston alkuun:#include "SD/Seeed_SD.h" #include <Seeed_FS.h> -
Lisää seuraava funktio ennen
setup-funktiota:void setupSDCard() { while (!SD.begin(SDCARD_SS_PIN, SDCARD_SPI)) { Serial.println("SD Card Error"); } }Tämä konfiguroi SD-kortin käyttämällä SPI-väylää.
-
Kutsu tätä
setup-funktiosta:setupSDCard(); -
Lisää seuraava koodi
buttonPressed-funktion yläpuolelle:int fileNum = 1; void saveToSDCard(byte *buffer, uint32_t length) { char buff[16]; sprintf(buff, "%d.jpg", fileNum); fileNum++; File outFile = SD.open(buff, FILE_WRITE ); outFile.write(buffer, length); outFile.close(); Serial.print("Image written to file "); Serial.println(buff); }Tämä määrittää globaalin muuttujan tiedostojen laskemiseen. Tätä käytetään kuvatiedoston nimissä, jotta useita kuvia voidaan tallentaa kasvavilla tiedostonimillä -
1.jpg,2.jpgja niin edelleen.Se määrittää myös
saveToSDCard-funktion, joka ottaa tavupuskurin ja puskurin pituuden. Tiedostonimi luodaan tiedostolaskurin avulla, ja laskuria kasvatetaan seuraavaa tiedostoa varten. Puskurin binääridata kirjoitetaan tiedostoon. -
Kutsu
saveToSDCard-funktiotabuttonPressed-funktiosta. Kutsun tulisi olla ennen puskurin poistamista:Serial.print("Image read to buffer with length "); Serial.println(length); saveToSDCard(buffer, length); delete(buffer); -
Rakenna ja lataa tämä koodi ja tarkista sarjaportin monitorin tuloste. Joka kerta, kun painat C-painiketta, kuva otetaan ja tallennetaan SD-kortille.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 16392 Image written to file 1.jpg Image captured Image read to buffer with length 14344 Image written to file 2.jpg -
Sammuta microSD-kortti ja poista se painamalla sitä hieman sisään ja vapauttamalla, jolloin se ponnahtaa ulos. Saatat joutua käyttämään ohutta työkalua tähän. Liitä microSD-kortti tietokoneeseesi nähdäksesi kuvat.
 💁 Kameran valkotasapainon säätämiseen voi kulua muutama kuva. Huomaat tämän kuvien värin perusteella, ensimmäiset kuvat voivat näyttää väriltään poikkeavilta. Voit aina kiertää tämän muuttamalla koodia siten, että
💁 Kameran valkotasapainon säätämiseen voi kulua muutama kuva. Huomaat tämän kuvien värin perusteella, ensimmäiset kuvat voivat näyttää väriltään poikkeavilta. Voit aina kiertää tämän muuttamalla koodia siten, että setup-funktiossa otetaan muutama kuva, jotka jätetään huomiotta.
Vastuuvapauslauseke:
Tämä asiakirja on käännetty käyttämällä tekoälypohjaista käännöspalvelua Co-op Translator. Vaikka pyrimme tarkkuuteen, huomioithan, että automaattiset käännökset voivat sisältää virheitä tai epätarkkuuksia. Alkuperäinen asiakirja sen alkuperäisellä kielellä tulisi pitää ensisijaisena lähteenä. Kriittisen tiedon osalta suositellaan ammattimaista ihmiskäännöstä. Emme ole vastuussa väärinkäsityksistä tai virhetulkinnoista, jotka johtuvat tämän käännöksen käytöstä.