5.2 KiB
Detectar proximidade - Raspberry Pi
Nesta parte da lição, você adicionará um sensor de proximidade ao seu Raspberry Pi e lerá a distância dele.
Hardware
O Raspberry Pi precisa de um sensor de proximidade.
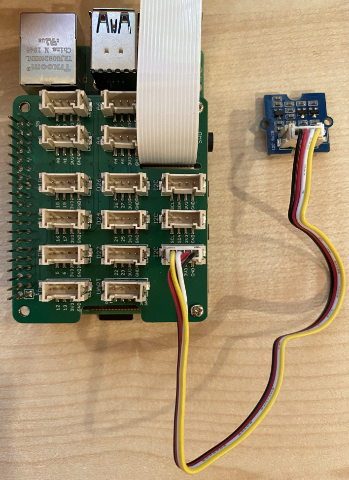
O sensor que você usará é um sensor de distância Grove Time of Flight. Este sensor utiliza um módulo de medição a laser para detectar distância. Ele possui um alcance de 10mm a 2000mm (1cm - 2m) e reporta valores nesse intervalo com bastante precisão, sendo que distâncias acima de 1000mm são reportadas como 8109mm.
O medidor de distância a laser está na parte traseira do sensor, no lado oposto ao conector Grove.
Este é um sensor I²C.
Conectar o sensor Time of Flight
O sensor Grove Time of Flight pode ser conectado ao Raspberry Pi.
Tarefa - conectar o sensor Time of Flight
Conecte o sensor Time of Flight.

-
Insira uma extremidade de um cabo Grove no conector do sensor Time of Flight. Ele só encaixará de uma maneira.
-
Com o Raspberry Pi desligado, conecte a outra extremidade do cabo Grove a um dos conectores I²C marcados como I²C no Grove Base Hat conectado ao Pi. Esses conectores estão na fileira inferior, no lado oposto aos pinos GPIO e próximos ao slot do cabo da câmera.
Programar o sensor Time of Flight
Agora o Raspberry Pi pode ser programado para usar o sensor Time of Flight conectado.
Tarefa - programar o sensor Time of Flight
Programe o dispositivo.
-
Ligue o Raspberry Pi e aguarde a inicialização.
-
Abra o código
fruit-quality-detectorno VS Code, diretamente no Pi ou conectando via a extensão Remote SSH. -
Instale o pacote rpi-vl53l0x do Pip, um pacote Python que interage com o sensor de distância VL53L0X Time of Flight. Instale-o usando este comando pip:
pip install rpi-vl53l0x -
Crie um novo arquivo neste projeto chamado
distance-sensor.py.💁 Uma maneira fácil de simular vários dispositivos IoT é criar cada um em um arquivo Python diferente e executá-los ao mesmo tempo.
-
Adicione o seguinte código a este arquivo:
import time from grove.i2c import Bus from rpi_vl53l0x.vl53l0x import VL53L0XIsso importa a biblioteca Grove I²C bus e uma biblioteca de sensor para o hardware principal integrado ao sensor Grove Time of Flight.
-
Abaixo disso, adicione o seguinte código para acessar o sensor:
distance_sensor = VL53L0X(bus = Bus().bus) distance_sensor.begin()Este código declara um sensor de distância usando o barramento Grove I²C e, em seguida, inicia o sensor.
-
Por fim, adicione um loop infinito para ler as distâncias:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)Este código aguarda um valor estar pronto para ser lido do sensor e, em seguida, o imprime no console.
-
Execute este código.
💁 Não se esqueça de que este arquivo se chama
distance-sensor.py! Certifique-se de executá-lo via Python, nãoapp.py. -
Você verá as medições de distância aparecerem no console. Posicione objetos próximos ao sensor e verá a medição de distância:
pi@raspberrypi:~/fruit-quality-detector $ python3 distance_sensor.py Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmO medidor de distância está na parte traseira do sensor, então certifique-se de usar o lado correto ao medir a distância.

💁 Você pode encontrar este código na pasta code-proximity/pi.
😀 Seu programa de sensor de proximidade foi um sucesso!
Aviso Legal:
Este documento foi traduzido utilizando o serviço de tradução por IA Co-op Translator. Embora nos esforcemos para garantir a precisão, esteja ciente de que traduções automatizadas podem conter erros ou imprecisões. O documento original em seu idioma nativo deve ser considerado a fonte autoritativa. Para informações críticas, recomenda-se a tradução profissional realizada por humanos. Não nos responsabilizamos por quaisquer mal-entendidos ou interpretações equivocadas decorrentes do uso desta tradução.