8.2 KiB
Capturar uma imagem - Raspberry Pi
Nesta parte da lição, você adicionará um sensor de câmera ao seu Raspberry Pi e lerá imagens dele.
Hardware
O Raspberry Pi precisa de uma câmera.
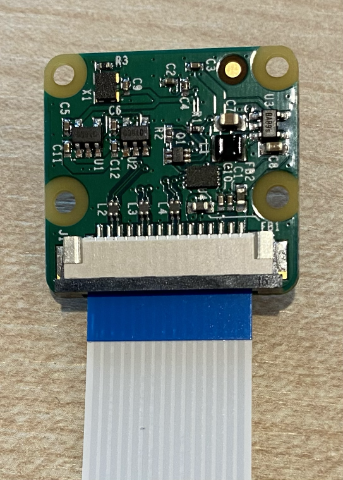
A câmera que você usará é o Módulo de Câmera Raspberry Pi. Esta câmera foi projetada para funcionar com o Raspberry Pi e se conecta por meio de um conector dedicado no Pi.
💁 Esta câmera utiliza o Camera Serial Interface, um protocolo da Mobile Industry Processor Interface Alliance, conhecido como MIPI-CSI. Este é um protocolo dedicado para envio de imagens.
Conectar a câmera
A câmera pode ser conectada ao Raspberry Pi usando um cabo flat.
Tarefa - conectar a câmera

-
Desligue o Raspberry Pi.
-
Conecte o cabo flat que vem com a câmera à própria câmera. Para fazer isso, puxe suavemente o clipe de plástico preto no suporte para que ele saia um pouco, depois deslize o cabo no conector, com o lado azul voltado para longe da lente e os pinos metálicos voltados para a lente. Depois que o cabo estiver completamente inserido, empurre o clipe de plástico preto de volta ao lugar.
Você pode encontrar uma animação mostrando como abrir o clipe e inserir o cabo na documentação de introdução ao módulo de câmera do Raspberry Pi.
-
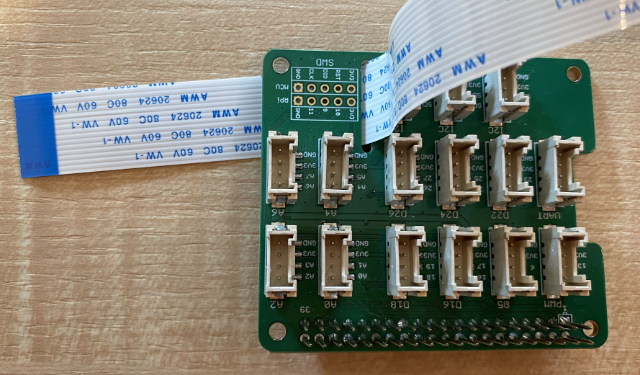
Remova o Grove Base Hat do Raspberry Pi.
-
Passe o cabo flat pelo slot da câmera no Grove Base Hat. Certifique-se de que o lado azul do cabo esteja voltado para as portas analógicas rotuladas como A0, A1, etc.
-
Insira o cabo flat no conector da câmera no Raspberry Pi. Novamente, puxe o clipe de plástico preto para cima, insira o cabo e empurre o clipe de volta ao lugar. O lado azul do cabo deve estar voltado para as portas USB e Ethernet.

-
Recoloque o Grove Base Hat.
Programar a câmera
Agora o Raspberry Pi pode ser programado para usar a câmera utilizando a biblioteca Python PiCamera.
Tarefa - habilitar o modo de câmera legado
Infelizmente, com o lançamento do Raspberry Pi OS Bullseye, o software de câmera que vinha com o sistema operacional foi alterado, o que significa que, por padrão, o PiCamera não funciona mais. Há um substituto em desenvolvimento, chamado PiCamera2, mas ele ainda não está pronto para uso.
Por enquanto, você pode configurar seu Raspberry Pi no modo de câmera legado para permitir que o PiCamera funcione. O conector da câmera também está desativado por padrão, mas ativar o software de câmera legado habilita automaticamente o conector.
-
Ligue o Raspberry Pi e aguarde a inicialização.
-
Abra o VS Code, diretamente no Raspberry Pi ou conecte-se via a extensão Remote SSH.
-
Execute os seguintes comandos no terminal:
sudo raspi-config nonint do_legacy 0 sudo rebootIsso ativará uma configuração para habilitar o software de câmera legado e reiniciará o Raspberry Pi para que a configuração entre em vigor.
-
Aguarde o Raspberry Pi reiniciar e reabra o VS Code.
Tarefa - programar a câmera
Programe o dispositivo.
-
No terminal, crie uma nova pasta no diretório home do usuário
pichamadafruit-quality-detector. Crie um arquivo nesta pasta chamadoapp.py. -
Abra esta pasta no VS Code.
-
Para interagir com a câmera, você pode usar a biblioteca Python PiCamera. Instale o pacote Pip com o seguinte comando:
pip3 install picamera -
Adicione o seguinte código ao arquivo
app.py:import io import time from picamera import PiCameraEste código importa algumas bibliotecas necessárias, incluindo a biblioteca
PiCamera. -
Adicione o seguinte código abaixo para inicializar a câmera:
camera = PiCamera() camera.resolution = (640, 480) camera.rotation = 0 time.sleep(2)Este código cria um objeto PiCamera e define a resolução para 640x480. Embora resoluções mais altas sejam suportadas (até 3280x2464), o classificador de imagens funciona com imagens muito menores (227x227), então não há necessidade de capturar e enviar imagens maiores.
A linha
camera.rotation = 0define a rotação da imagem. O cabo flat entra na parte inferior da câmera, mas se sua câmera estiver girada para facilitar o apontamento para o item que você deseja classificar, você pode alterar esta linha para o número de graus de rotação.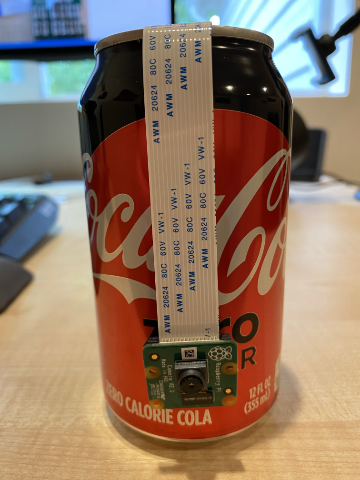
Por exemplo, se você suspender o cabo flat sobre algo para que ele fique na parte superior da câmera, defina a rotação como 180:
camera.rotation = 180A câmera leva alguns segundos para iniciar, por isso a linha
time.sleep(2). -
Adicione o seguinte código abaixo para capturar a imagem como dados binários:
image = io.BytesIO() camera.capture(image, 'jpeg') image.seek(0)Este código cria um objeto
BytesIOpara armazenar dados binários. A imagem é lida da câmera como um arquivo JPEG e armazenada neste objeto. Este objeto possui um indicador de posição para saber onde está nos dados, permitindo que mais dados sejam escritos no final, se necessário. A linhaimage.seek(0)move esta posição de volta ao início para que todos os dados possam ser lidos posteriormente. -
Abaixo disso, adicione o seguinte código para salvar a imagem em um arquivo:
with open('image.jpg', 'wb') as image_file: image_file.write(image.read())Este código abre um arquivo chamado
image.jpgpara escrita, lê todos os dados do objetoBytesIOe os escreve no arquivo.💁 Você pode capturar a imagem diretamente em um arquivo em vez de um objeto
BytesIOpassando o nome do arquivo para a chamadacamera.capture. O motivo para usar o objetoBytesIOé que, mais tarde nesta lição, você poderá enviar a imagem para seu classificador de imagens. -
Aponte a câmera para algo e execute este código.
-
Uma imagem será capturada e salva como
image.jpgna pasta atual. Você verá este arquivo no explorador do VS Code. Selecione o arquivo para visualizar a imagem. Se precisar de rotação, atualize a linhacamera.rotation = 0conforme necessário e tire outra foto.
💁 Você pode encontrar este código na pasta code-camera/pi.
😀 Seu programa de câmera foi um sucesso!
Aviso Legal:
Este documento foi traduzido utilizando o serviço de tradução por IA Co-op Translator. Embora nos esforcemos para garantir a precisão, esteja ciente de que traduções automatizadas podem conter erros ou imprecisões. O documento original em seu idioma nativo deve ser considerado a fonte autoritativa. Para informações críticas, recomenda-se a tradução profissional realizada por humanos. Não nos responsabilizamos por quaisquer mal-entendidos ou interpretações equivocadas decorrentes do uso desta tradução.