2.9 KiB
Addestrare un'Auto di Montagna
OpenAI Gym è stato progettato in modo tale che tutti gli ambienti forniscano la stessa API, ovvero gli stessi metodi di reset, step e render e le stesse astrazioni dello spazio di azione e dello spazio di osservazione. Pertanto dovrebbe essere possibile adattare gli stessi algoritmi di reinforcement learning a diversi ambienti con modifiche minime al codice.
Un ambiente automobilistico di montagna
L'ambiente Mountain Car contiene un'auto bloccata in una valle:
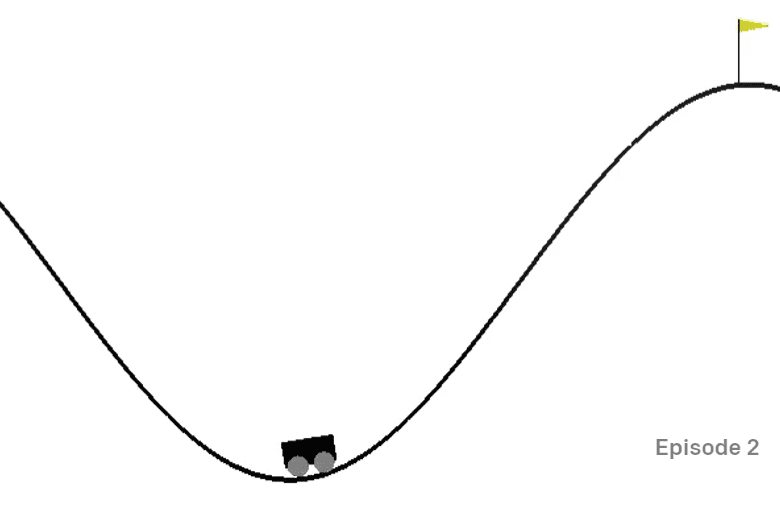
L'obiettivo è uscire dalla valle e catturare la bandiera, compiendo ad ogni passaggio una delle seguenti azioni:
| Valore | Significato |
|---|---|
| 0 | Accelerare a sinistra |
| 1 | Non accelerare |
| 2 | Accelerare a destra |
Il trucco principale di questo problema è, tuttavia, che il motore dell'auto non è abbastanza forte per scalare la montagna in un solo passaggio. Pertanto, l'unico modo per avere successo è andare avanti e indietro per aumentare lo slancio.
Lo spazio di osservazione è costituito da due soli valori:
| Num | Osservazione | Min | Max |
|---|---|---|---|
| 0 | Posizione dell'auto | -1,2 | 0.6 |
| 1 | Velocità dell'auto | -0.07% | 0,07 |
Il sistema di ricompensa per l'auto di montagna è piuttosto complicato:
- La ricompensa di 0 viene assegnata se l'agente ha raggiunto la bandiera (posizione = 0,5) in cima alla montagna.
- La ricompensa di -1 viene assegnata se la posizione dell'agente è inferiore a 0,5.
L'episodio termina se la posizione dell'auto è maggiore di 0,5 o la durata dell'episodio è maggiore di 200.
Istruzioni
Adattare l'algoritmo di reinforcement learning per risolvere il problema della macchina di montagna. Iniziare con il codice nel notebook.ipynb esistente, sostituire il nuovo ambiente, modificare le funzioni di discretizzazione dello stato e provare ad addestrare l'algoritmo esistente con modifiche minime del codice. Ottimizzare il risultato regolando gli iperparametri.
Nota: è probabile che sia necessaria la regolazione degli iperparametri per far convergere l'algoritmo.
Rubrica
| Criteri | Ottimo | Adeguato | Necessita miglioramento |
|---|---|---|---|
| L'algoritmo di Q-Learning è stato adattato con successo dall'esempio CartPole, con modifiche minime al codice, che è in grado di risolvere il problema di catturare la bandiera in meno di 200 passaggi. | Un nuovo algoritmo di Q-Learning è stato adottato da Internet, ma è ben documentato; oppure è stato adottato l'algoritmo esistente, ma non raggiunge i risultati desiderati | Lo studente non è stato in grado di adottare con successo alcun algoritmo, ma ha compiuto passi sostanziali verso la soluzione (discretizzazione dello stato implementata, struttura dati Q-Table, ecc.) |