4.6 KiB
检测接近 - 树莓派
在本课的这一部分,你将为树莓派添加一个接近传感器,并读取其测量的距离。
硬件
树莓派需要一个接近传感器。
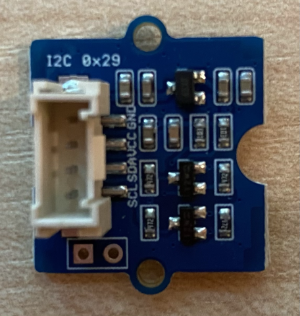
你将使用的传感器是 Grove 飞行时间距离传感器。该传感器使用激光测距模块来检测距离,测量范围为 10mm 到 2000mm(1cm - 2m)。在此范围内,它可以非常准确地报告距离,超过 1000mm 的距离会被报告为 8109mm。
激光测距仪位于传感器背面,与 Grove 插座相对的一侧。
这是一个 I²C 传感器。
连接飞行时间传感器
Grove 飞行时间传感器可以连接到树莓派。
任务 - 连接飞行时间传感器
连接飞行时间传感器。
-
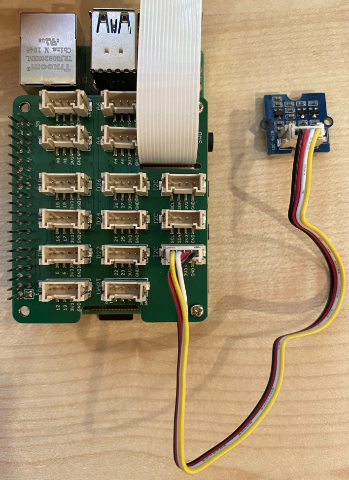
将 Grove 电缆的一端插入飞行时间传感器上的插座。电缆只能以一种方向插入。
-
在树莓派断电的情况下,将 Grove 电缆的另一端连接到 Grove Base Hat 上标有 I²C 的插座之一。这些插座位于底部一排,与 GPIO 引脚相对的一端,靠近摄像头电缆插槽。
编程飞行时间传感器
现在可以为树莓派编写程序,以使用连接的飞行时间传感器。
任务 - 编程飞行时间传感器
为设备编写程序。
-
启动树莓派并等待其启动完成。
-
在 VS Code 中打开
fruit-quality-detector代码,可以直接在树莓派上操作,也可以通过 Remote SSH 扩展连接。 -
安装 rpi-vl53l0x Pip 包,这是一个用于与 VL53L0X 飞行时间距离传感器交互的 Python 包。使用以下 pip 命令安装:
pip install rpi-vl53l0x -
在该项目中创建一个名为
distance-sensor.py的新文件。💁 模拟多个 IoT 设备的一个简单方法是为每个设备创建一个单独的 Python 文件,然后同时运行它们。
-
将以下代码添加到该文件中:
import time from grove.i2c import Bus from rpi_vl53l0x.vl53l0x import VL53L0X这段代码导入了 Grove I²C 总线库,以及用于 Grove 飞行时间传感器核心硬件的传感器库。
-
在此代码下方,添加以下代码以访问传感器:
distance_sensor = VL53L0X(bus = Bus().bus) distance_sensor.begin()这段代码使用 Grove I²C 总线声明了一个距离传感器,然后启动了传感器。
-
最后,添加一个无限循环以读取距离:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)这段代码等待传感器准备好读取值,然后将其打印到控制台。
-
运行此代码。
💁 别忘了这个文件名是
distance-sensor.py!确保通过 Python 运行它,而不是app.py。 -
你将在控制台中看到距离测量值。将物体放置在传感器附近,你会看到距离测量值:
pi@raspberrypi:~/fruit-quality-detector $ python3 distance_sensor.py Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mm测距仪位于传感器背面,因此在测量距离时请确保使用正确的一侧。

💁 你可以在 code-proximity/pi 文件夹中找到这段代码。
😀 你的接近传感器程序运行成功!
免责声明:
本文档使用AI翻译服务 Co-op Translator 进行翻译。尽管我们努力确保翻译的准确性,但请注意,自动翻译可能包含错误或不准确之处。应以原文档的原始语言版本为权威来源。对于关键信息,建议使用专业人工翻译。我们对因使用此翻译而引起的任何误解或误读不承担责任。