5.8 KiB
读取 GPS 数据 - Wio Terminal
在本课的这一部分中,您将为 Wio Terminal 添加一个 GPS 传感器,并读取其数据。
硬件
Wio Terminal 需要一个 GPS 传感器。
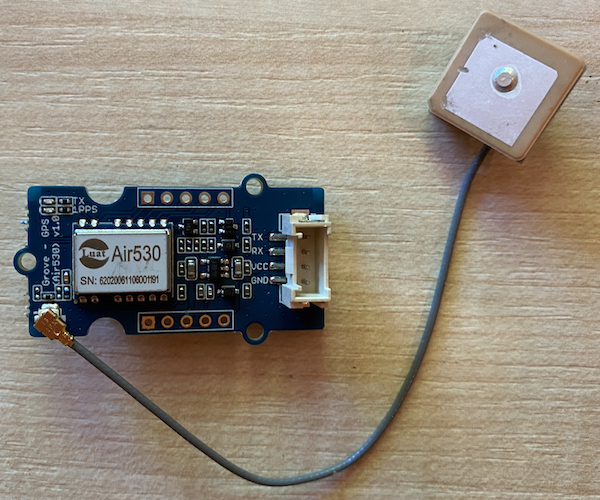
您将使用的传感器是 Grove GPS Air530 传感器。该传感器可以连接到多个 GPS 系统,以实现快速、准确的定位。传感器由两部分组成——传感器的核心电子部分,以及通过一根细线连接的外部天线,用于接收来自卫星的无线电波。
这是一个 UART 传感器,因此通过 UART 发送 GPS 数据。
连接 GPS 传感器
Grove GPS 传感器可以连接到 Wio Terminal。
任务 - 连接 GPS 传感器
连接 GPS 传感器。
-
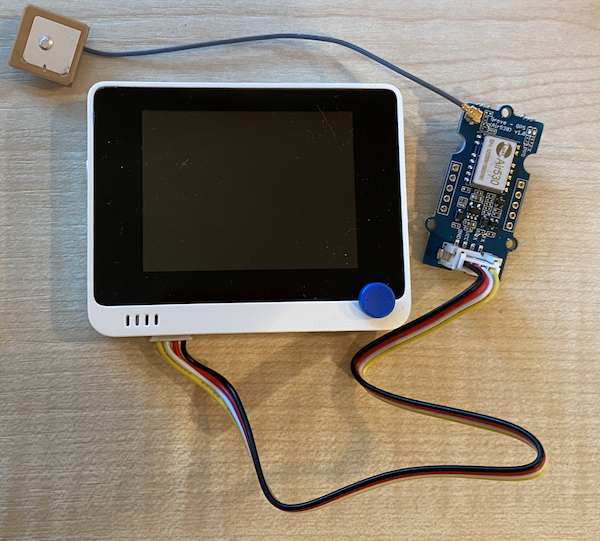
将 Grove 电缆的一端插入 GPS 传感器上的插座。电缆只能以一种方向插入。
-
在 Wio Terminal 未连接到计算机或其他电源的情况下,将 Grove 电缆的另一端连接到 Wio Terminal 屏幕左侧的 Grove 插座。这是靠近电源按钮的插座。
-
将 GPS 传感器放置在附带天线可以看到天空的位置——理想情况下靠近窗户或在室外。天线周围没有障碍物时,更容易获得清晰的信号。
-
现在可以将 Wio Terminal 连接到您的计算机。
-
GPS 传感器有两个 LED 指示灯——蓝色 LED 在传输数据时闪烁,绿色 LED 在接收到来自卫星的数据时每秒闪烁一次。确保在 Wio Terminal 通电时蓝色 LED 闪烁。几分钟后,绿色 LED 会开始闪烁——如果没有,您可能需要重新调整天线的位置。
编程 GPS 传感器
现在可以为 Wio Terminal 编写程序,以使用连接的 GPS 传感器。
任务 - 编程 GPS 传感器
为设备编写程序。
-
使用 PlatformIO 创建一个全新的 Wio Terminal 项目。将该项目命名为
gps-sensor。在setup函数中添加代码以配置串口。 -
在
main.cpp文件顶部添加以下 include 指令。这将包含一个头文件,其中包含用于配置左侧 Grove 端口为 UART 的函数。#include <wiring_private.h> -
在此之后,添加以下代码行以声明一个与 UART 端口的串口连接:
static Uart Serial3(&sercom3, PIN_WIRE_SCL, PIN_WIRE_SDA, SERCOM_RX_PAD_1, UART_TX_PAD_0); -
您需要添加一些代码,将一些内部信号处理程序重定向到该串口。将以下代码添加到
Serial3声明之后:void SERCOM3_0_Handler() { Serial3.IrqHandler(); } void SERCOM3_1_Handler() { Serial3.IrqHandler(); } void SERCOM3_2_Handler() { Serial3.IrqHandler(); } void SERCOM3_3_Handler() { Serial3.IrqHandler(); } -
在
setup函数中,在配置Serial端口的代码之后,使用以下代码配置 UART 串口:Serial3.begin(9600); while (!Serial3) ; // Wait for Serial3 to be ready delay(1000); -
在
setup函数中的上述代码之后,添加以下代码以将 Grove 引脚连接到串口:pinPeripheral(PIN_WIRE_SCL, PIO_SERCOM_ALT); -
在
loop函数之前,添加以下函数以将 GPS 数据发送到串口监视器:void printGPSData() { Serial.println(Serial3.readStringUntil('\n')); } -
在
loop函数中,添加以下代码以从 UART 串口读取数据并将输出打印到串口监视器:while (Serial3.available() > 0) { printGPSData(); } delay(1000);这段代码从 UART 串口读取数据。
readStringUntil函数会读取直到终止符(在本例中是换行符)为止的数据。这将读取整个 NMEA 语句(NMEA 语句以换行符结束)。只要可以从 UART 串口读取数据,就会读取数据并通过printGPSData函数发送到串口监视器。一旦无法读取更多数据,loop会延迟 1 秒(1,000 毫秒)。 -
构建并上传代码到 Wio Terminal。
-
上传完成后,您可以使用串口监视器查看 GPS 数据。
> Executing task: platformio device monitor < --- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time --- More details at http://bit.ly/pio-monitor-filters --- Miniterm on /dev/cu.usbmodem1201 9600,8,N,1 --- --- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68
💁 您可以在 code-gps/wio-terminal 文件夹中找到这段代码。
😀 恭喜!您的 GPS 传感器程序运行成功!
免责声明:
本文档使用AI翻译服务 Co-op Translator 进行翻译。尽管我们努力确保翻译的准确性,但请注意,自动翻译可能包含错误或不准确之处。应以原文档的原始语言版本为权威来源。对于关键信息,建议使用专业人工翻译。我们对因使用此翻译而引起的任何误解或误读不承担责任。