6.8 KiB
读取 GPS 数据 - 虚拟物联网硬件
在本课程的这一部分,你将为虚拟物联网设备添加一个 GPS 传感器,并从中读取数据。
虚拟硬件
虚拟物联网设备将使用一个通过串口 UART 访问的模拟 GPS 传感器。
物理 GPS 传感器通常配备天线,用于接收来自 GPS 卫星的无线电波,并将 GPS 信号转换为 GPS 数据。虚拟版本通过以下方式进行模拟:你可以设置纬度和经度、发送原始 NMEA 语句,或者上传包含多个位置的 GPX 文件,这些位置将按顺序返回。
🎓 NMEA 语句将在本课程后续部分介绍
将传感器添加到 CounterFit
要使用虚拟 GPS 传感器,你需要将其添加到 CounterFit 应用中。
任务 - 将传感器添加到 CounterFit
将 GPS 传感器添加到 CounterFit 应用。
-
在你的电脑上创建一个名为
gps-sensor的文件夹,并在其中创建一个新的 Python 应用,包含一个名为app.py的文件和一个 Python 虚拟环境,然后添加 CounterFit 的 pip 包。⚠️ 如果需要,可以参考课程 1 中关于创建和设置 CounterFit Python 项目的说明。
-
安装一个额外的 Pip 包,用于安装一个 CounterFit shim,可以通过串口与基于 UART 的传感器通信。确保在激活虚拟环境的终端中安装此包。
pip install counterfit-shims-serial -
确保 CounterFit 网页应用正在运行。
-
创建一个 GPS 传感器:
-
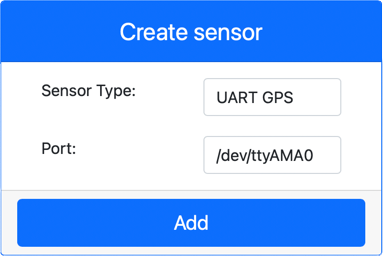
在 Sensors 面板的 Create sensor 框中,点击 Sensor type 下拉框并选择 UART GPS。
-
将 Port 保持为 /dev/ttyAMA0。
-
点击 Add 按钮,在端口
/dev/ttyAMA0上创建 GPS 传感器。
GPS 传感器将被创建并显示在传感器列表中。
-
编程 GPS 传感器
现在可以为虚拟物联网设备编程以使用虚拟 GPS 传感器。
任务 - 编程 GPS 传感器
编写 GPS 传感器应用程序。
-
确保
gps-sensor应用已在 VS Code 中打开。 -
打开
app.py文件。 -
在
app.py文件顶部添加以下代码,将应用连接到 CounterFit:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
在此代码下方添加以下代码,导入一些所需的库,包括用于 CounterFit 串口的库:
import time import counterfit_shims_serial serial = counterfit_shims_serial.Serial('/dev/ttyAMA0')此代码从
counterfit_shims_serialPip 包中导入serial模块。然后连接到/dev/ttyAMA0串口——这是虚拟 GPS 传感器用于其 UART 端口的地址。 -
在此代码下方添加以下代码,从串口读取数据并将值打印到控制台:
def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)定义了一个名为
print_gps_data的函数,用于将传入的行打印到控制台。接下来,代码进入一个无限循环,在每次循环中尽可能多地从串口读取文本行。它为每一行调用
print_gps_data函数。读取完所有数据后,循环会休眠 1 秒,然后再次尝试。
-
运行此代码,确保使用与运行 CounterFit 应用不同的终端,以便 CounterFit 应用保持运行状态。
-
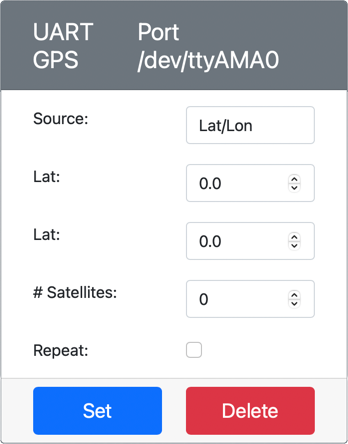
在 CounterFit 应用中更改 GPS 传感器的值。你可以通过以下方式之一进行更改:
-
将 Source 设置为
Lat/Lon,并设置明确的纬度、经度以及用于获取 GPS 定位的卫星数量。此值将仅发送一次,因此勾选 Repeat 复选框以使数据每秒重复发送。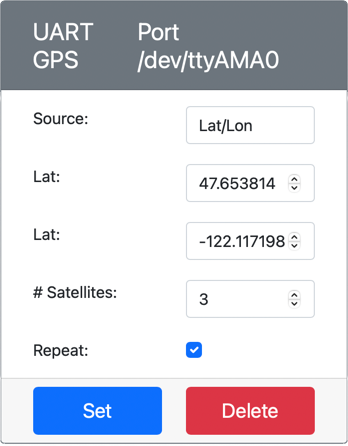
-
将 Source 设置为
NMEA,并在文本框中添加一些 NMEA 语句。所有这些值将被发送,每个新的 GGA(位置固定)语句之间有 1 秒的延迟。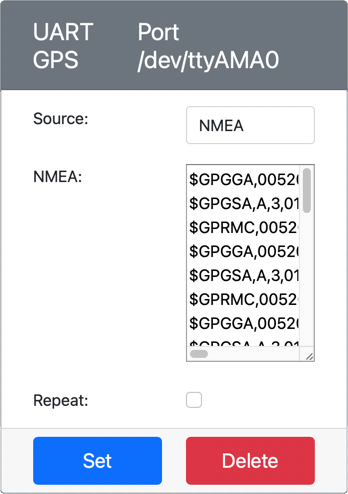
你可以使用类似 nmeagen.org 的工具通过在地图上绘制来生成这些语句。这些值将仅发送一次,因此勾选 Repeat 复选框以使数据在全部发送后每秒重复一次。
-
将 Source 设置为 GPX 文件,并上传一个包含轨迹位置的 GPX 文件。你可以从许多流行的地图和徒步网站(如 AllTrails)下载 GPX 文件。这些文件包含多个 GPS 位置作为轨迹,GPS 传感器将以 1 秒间隔返回每个新位置。
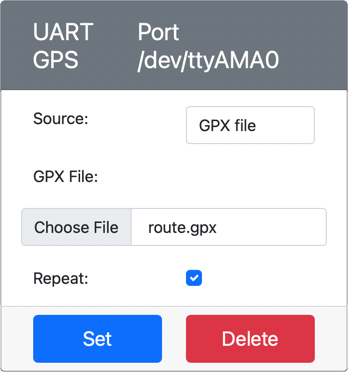
这些值将仅发送一次,因此勾选 Repeat 复选框以使数据在全部发送后每秒重复一次。
配置 GPS 设置后,点击 Set 按钮将这些值提交到传感器。
-
-
你将看到来自 GPS 传感器的原始输出,类似如下:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
💁 你可以在 code-gps/virtual-device 文件夹中找到此代码。
😀 恭喜!你的 GPS 传感器程序运行成功!
免责声明:
本文档使用AI翻译服务Co-op Translator进行翻译。尽管我们努力确保翻译的准确性,但请注意,自动翻译可能包含错误或不准确之处。应以原始语言的文档作为权威来源。对于关键信息,建议使用专业人工翻译。我们对因使用本翻译而引起的任何误解或误读不承担责任。