33 KiB
Захоплення аудіо - Wio Terminal
У цій частині уроку ви напишете код для захоплення аудіо на вашому Wio Terminal. Захоплення аудіо буде керуватися однією з кнопок на верхній частині Wio Terminal.
Програмування пристрою для захоплення аудіо
Ви можете захоплювати аудіо з мікрофона за допомогою коду на C++. Wio Terminal має лише 192KB оперативної пам'яті, чого недостатньо для захоплення більше кількох секунд аудіо. Однак він також має 4MB флеш-пам'яті, яку можна використовувати для збереження захопленого аудіо.
Вбудований мікрофон захоплює аналоговий сигнал, який перетворюється на цифровий сигнал, що може використовувати Wio Terminal. Під час захоплення аудіо дані потрібно захоплювати у правильний момент - наприклад, щоб захопити аудіо на частоті 16KHz, аудіо потрібно захоплювати точно 16,000 разів на секунду з рівними інтервалами між кожним зразком. Замість того, щоб використовувати ваш код для цього, ви можете скористатися контролером прямого доступу до пам'яті (DMAC). Це апаратна схема, яка може захоплювати сигнал з певного джерела і записувати його в пам'ять без переривання виконання вашого коду на процесорі.
✅ Дізнайтеся більше про DMA на сторінці прямого доступу до пам'яті у Вікіпедії.
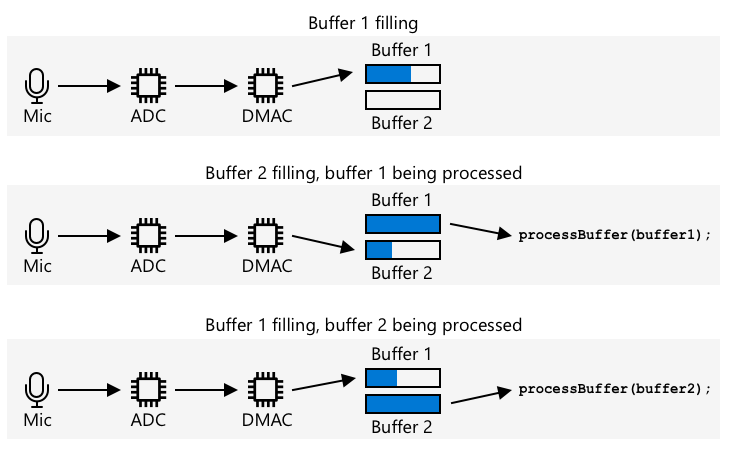
DMAC може захоплювати аудіо з ADC на фіксованих інтервалах, наприклад, 16,000 разів на секунду для аудіо 16KHz. Він може записувати ці дані у попередньо виділений буфер пам'яті, і коли цей буфер заповнений, він стає доступним для вашого коду для обробки. Використання цієї пам'яті може затримати захоплення аудіо, але ви можете налаштувати кілька буферів. DMAC записує дані в буфер 1, потім, коли він заповнений, повідомляє ваш код для обробки буфера 1, поки DMAC записує дані в буфер 2. Коли буфер 2 заповнений, він повідомляє ваш код і повертається до запису в буфер 1. Таким чином, якщо ви обробляєте кожен буфер швидше, ніж час, необхідний для його заповнення, ви не втратите жодних даних.
Після захоплення кожного буфера його можна записати у флеш-пам'ять. Флеш-пам'ять потрібно записувати, використовуючи визначені адреси, вказуючи, куди записувати і якого розміру записувати, подібно до оновлення масиву байтів у пам'яті. Флеш-пам'ять має гранулярність, тобто операції стирання і запису залежать не лише від фіксованого розміру, але й від вирівнювання до цього розміру. Наприклад, якщо гранулярність становить 4096 байтів, і ви запитуєте стирання за адресою 4200, це може стерти всі дані з адреси 4096 до 8192. Це означає, що коли ви записуєте аудіо дані у флеш-пам'ять, це має бути у шматках правильного розміру.
Завдання - налаштування флеш-пам'яті
-
Створіть новий проект Wio Terminal за допомогою PlatformIO. Назвіть цей проект
smart-timer. Додайте код у функціюsetupдля налаштування послідовного порту. -
Додайте наступні залежності бібліотеки до файлу
platformio.ini, щоб отримати доступ до флеш-пам'яті:lib_deps = seeed-studio/Seeed Arduino FS @ 2.1.1 seeed-studio/Seeed Arduino SFUD @ 2.0.2 -
Відкрийте файл
main.cppі додайте наступну директиву включення для бібліотеки флеш-пам'яті у верхній частині файлу:#include <sfud.h> #include <SPI.h>🎓 SFUD означає Serial Flash Universal Driver, і це бібліотека, розроблена для роботи з усіма чіпами флеш-пам'яті.
-
У функції
setupдодайте наступний код для налаштування бібліотеки флеш-пам'яті:while (!(sfud_init() == SFUD_SUCCESS)) ; sfud_qspi_fast_read_enable(sfud_get_device(SFUD_W25Q32_DEVICE_INDEX), 2);Цей код циклічно виконується, поки бібліотека SFUD не буде ініціалізована, а потім увімкнено швидке читання. Вбудована флеш-пам'ять може бути доступна за допомогою Queued Serial Peripheral Interface (QSPI), типу SPI-контролера, який дозволяє безперервний доступ через чергу з мінімальним використанням процесора. Це робить читання і запис у флеш-пам'ять швидшими.
-
Створіть новий файл у папці
srcпід назвоюflash_writer.h. -
Додайте наступне у верхній частині цього файлу:
#pragma once #include <Arduino.h> #include <sfud.h>Це включає необхідні заголовкові файли, включаючи заголовковий файл бібліотеки SFUD для взаємодії з флеш-пам'яттю.
-
Визначте клас у цьому новому заголовковому файлі під назвою
FlashWriter:class FlashWriter { public: private: }; -
У секції
privateдодайте наступний код:byte *_sfudBuffer; size_t _sfudBufferSize; size_t _sfudBufferPos; size_t _sfudBufferWritePos; const sfud_flash *_flash;Це визначає деякі поля для буфера, який використовується для зберігання даних перед записом у флеш-пам'ять. Є масив байтів
_sfudBufferдля запису даних, і коли він заповнений, дані записуються у флеш-пам'ять. Поле_sfudBufferPosзберігає поточне місце для запису в цьому буфері, а_sfudBufferWritePosзберігає місце у флеш-пам'яті для запису._flash- це вказівник на флеш-пам'ять для запису - деякі мікроконтролери мають кілька чіпів флеш-пам'яті. -
Додайте наступний метод до секції
publicдля ініціалізації цього класу:void init() { _flash = sfud_get_device_table() + 0; _sfudBufferSize = _flash->chip.erase_gran; _sfudBuffer = new byte[_sfudBufferSize]; _sfudBufferPos = 0; _sfudBufferWritePos = 0; }Це налаштовує флеш-пам'ять на Wio Terminal для запису і встановлює буфери на основі розміру зерна флеш-пам'яті. Це знаходиться в методі
init, а не в конструкторі, оскільки це потрібно викликати після налаштування флеш-пам'яті у функціїsetup. -
Додайте наступний код до секції
public:void writeSfudBuffer(byte b) { _sfudBuffer[_sfudBufferPos++] = b; if (_sfudBufferPos == _sfudBufferSize) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } } void writeSfudBuffer(byte *b, size_t len) { for (size_t i = 0; i < len; ++i) { writeSfudBuffer(b[i]); } } void flushSfudBuffer() { if (_sfudBufferPos > 0) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } }Цей код визначає методи для запису байтів у систему зберігання флеш-пам'яті. Він працює, записуючи у буфер пам'яті, який має правильний розмір для флеш-пам'яті, і коли цей буфер заповнений, він записується у флеш-пам'ять, стираючи будь-які існуючі дані у цьому місці. Також є метод
flushSfudBufferдля запису неповного буфера, оскільки дані, що захоплюються, не будуть точними кратними розміру зерна, тому кінцева частина даних повинна бути записана.💁 Кінцева частина даних запише додаткові небажані дані, але це нормально, оскільки буде читатися лише потрібні дані.
Завдання - налаштування захоплення аудіо
-
Створіть новий файл у папці
srcпід назвоюconfig.h. -
Додайте наступне у верхній частині цього файлу:
#pragma once #define RATE 16000 #define SAMPLE_LENGTH_SECONDS 4 #define SAMPLES RATE * SAMPLE_LENGTH_SECONDS #define BUFFER_SIZE (SAMPLES * 2) + 44 #define ADC_BUF_LEN 1600Цей код налаштовує деякі константи для захоплення аудіо.
Константа Значення Опис RATE 16000 Частота вибірки для аудіо. 16,000 - це 16KHz SAMPLE_LENGTH_SECONDS 4 Тривалість аудіо для захоплення. Встановлено на 4 секунди. Щоб записати довше аудіо, збільшіть це значення. SAMPLES 64000 Загальна кількість аудіо зразків, які будуть захоплені. Встановлено як частота вибірки * кількість секунд BUFFER_SIZE 128044 Розмір буфера аудіо для захоплення. Аудіо буде захоплено як WAV-файл, який має 44 байти заголовка, потім 128,000 байтів аудіо даних (кожен зразок - 2 байти) ADC_BUF_LEN 1600 Розмір буферів для використання при захопленні аудіо з DMAC 💁 Якщо ви вважаєте, що 4 секунди занадто короткий час для запиту таймера, ви можете збільшити значення
SAMPLE_LENGTH_SECONDS, і всі інші значення будуть перераховані. -
Створіть новий файл у папці
srcпід назвоюmic.h. -
Додайте наступне у верхній частині цього файлу:
#pragma once #include <Arduino.h> #include "config.h" #include "flash_writer.h"Це включає необхідні заголовкові файли, включаючи заголовкові файли
config.hіFlashWriter. -
Додайте наступне для визначення класу
Mic, який може захоплювати дані з мікрофона:class Mic { public: Mic() { _isRecording = false; _isRecordingReady = false; } void startRecording() { _isRecording = true; _isRecordingReady = false; } bool isRecording() { return _isRecording; } bool isRecordingReady() { return _isRecordingReady; } private: volatile bool _isRecording; volatile bool _isRecordingReady; FlashWriter _writer; }; Mic mic;Цей клас наразі має лише кілька полів для відстеження, чи розпочато запис, і чи готовий запис для використання. Коли DMAC налаштований, він безперервно записує дані у буфери пам'яті, тому прапорець
_isRecordingвизначає, чи ці дані повинні оброблятися чи ігноруватися. Прапорець_isRecordingReadyбуде встановлений, коли необхідні 4 секунди аудіо будуть захоплені. Поле_writerвикористовується для збереження аудіо даних у флеш-пам'ять.Потім оголошується глобальна змінна для екземпляра класу
Mic. -
Додайте наступний код до секції
privateкласуMic:typedef struct { uint16_t btctrl; uint16_t btcnt; uint32_t srcaddr; uint32_t dstaddr; uint32_t descaddr; } dmacdescriptor; // Globals - DMA and ADC volatile dmacdescriptor _wrb[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor_section[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor __attribute__((aligned(16))); void configureDmaAdc() { // Configure DMA to sample from ADC at a regular interval (triggered by timer/counter) DMAC->BASEADDR.reg = (uint32_t)_descriptor_section; // Specify the location of the descriptors DMAC->WRBADDR.reg = (uint32_t)_wrb; // Specify the location of the write back descriptors DMAC->CTRL.reg = DMAC_CTRL_DMAENABLE | DMAC_CTRL_LVLEN(0xf); // Enable the DMAC peripheral DMAC->Channel[1].CHCTRLA.reg = DMAC_CHCTRLA_TRIGSRC(TC5_DMAC_ID_OVF) | // Set DMAC to trigger on TC5 timer overflow DMAC_CHCTRLA_TRIGACT_BURST; // DMAC burst transfer _descriptor.descaddr = (uint32_t)&_descriptor_section[1]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_0 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_0 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[0], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section _descriptor.descaddr = (uint32_t)&_descriptor_section[0]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_1 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_1 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[1], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section // Configure NVIC NVIC_SetPriority(DMAC_1_IRQn, 0); // Set the Nested Vector Interrupt Controller (NVIC) priority for DMAC1 to 0 (highest) NVIC_EnableIRQ(DMAC_1_IRQn); // Connect DMAC1 to Nested Vector Interrupt Controller (NVIC) // Activate the suspend (SUSP) interrupt on DMAC channel 1 DMAC->Channel[1].CHINTENSET.reg = DMAC_CHINTENSET_SUSP; // Configure ADC ADC1->INPUTCTRL.bit.MUXPOS = ADC_INPUTCTRL_MUXPOS_AIN12_Val; // Set the analog input to ADC0/AIN2 (PB08 - A4 on Metro M4) while (ADC1->SYNCBUSY.bit.INPUTCTRL) ; // Wait for synchronization ADC1->SAMPCTRL.bit.SAMPLEN = 0x00; // Set max Sampling Time Length to half divided ADC clock pulse (2.66us) while (ADC1->SYNCBUSY.bit.SAMPCTRL) ; // Wait for synchronization ADC1->CTRLA.reg = ADC_CTRLA_PRESCALER_DIV128; // Divide Clock ADC GCLK by 128 (48MHz/128 = 375kHz) ADC1->CTRLB.reg = ADC_CTRLB_RESSEL_12BIT | // Set ADC resolution to 12 bits ADC_CTRLB_FREERUN; // Set ADC to free run mode while (ADC1->SYNCBUSY.bit.CTRLB) ; // Wait for synchronization ADC1->CTRLA.bit.ENABLE = 1; // Enable the ADC while (ADC1->SYNCBUSY.bit.ENABLE) ; // Wait for synchronization ADC1->SWTRIG.bit.START = 1; // Initiate a software trigger to start an ADC conversion while (ADC1->SYNCBUSY.bit.SWTRIG) ; // Wait for synchronization // Enable DMA channel 1 DMAC->Channel[1].CHCTRLA.bit.ENABLE = 1; // Configure Timer/Counter 5 GCLK->PCHCTRL[TC5_GCLK_ID].reg = GCLK_PCHCTRL_CHEN | // Enable peripheral channel for TC5 GCLK_PCHCTRL_GEN_GCLK1; // Connect generic clock 0 at 48MHz TC5->COUNT16.WAVE.reg = TC_WAVE_WAVEGEN_MFRQ; // Set TC5 to Match Frequency (MFRQ) mode TC5->COUNT16.CC[0].reg = 3000 - 1; // Set the trigger to 16 kHz: (4Mhz / 16000) - 1 while (TC5->COUNT16.SYNCBUSY.bit.CC0) ; // Wait for synchronization // Start Timer/Counter 5 TC5->COUNT16.CTRLA.bit.ENABLE = 1; // Enable the TC5 timer while (TC5->COUNT16.SYNCBUSY.bit.ENABLE) ; // Wait for synchronization } uint16_t _adc_buf_0[ADC_BUF_LEN]; uint16_t _adc_buf_1[ADC_BUF_LEN];Цей код визначає метод
configureDmaAdc, який налаштовує DMAC, підключаючи його до ADC і встановлюючи його для заповнення двох різних чергуючих буферів,_adc_buf_0і_adc_buf_1.💁 Одним із недоліків розробки для мікроконтролерів є складність коду, необхідного для взаємодії з апаратним забезпеченням, оскільки ваш код працює на дуже низькому рівні, безпосередньо взаємодіючи з апаратним забезпеченням. Цей код складніший, ніж той, який ви б написали для одноплатного комп'ютера або настільного комп'ютера, оскільки немає операційної системи, яка б допомагала. Деякі бібліотеки доступні, які можуть спростити це, але все одно залишається багато складності.
-
Нижче цього додайте наступний код:
// WAV files have a header. This struct defines that header struct wavFileHeader { char riff[4]; /* "RIFF" */ long flength; /* file length in bytes */ char wave[4]; /* "WAVE" */ char fmt[4]; /* "fmt " */ long chunk_size; /* size of FMT chunk in bytes (usually 16) */ short format_tag; /* 1=PCM, 257=Mu-Law, 258=A-Law, 259=ADPCM */ short num_chans; /* 1=mono, 2=stereo */ long srate; /* Sampling rate in samples per second */ long bytes_per_sec; /* bytes per second = srate*bytes_per_samp */ short bytes_per_samp; /* 2=16-bit mono, 4=16-bit stereo */ short bits_per_samp; /* Number of bits per sample */ char data[4]; /* "data" */ long dlength; /* data length in bytes (filelength - 44) */ }; void initBufferHeader() { wavFileHeader wavh; strncpy(wavh.riff, "RIFF", 4); strncpy(wavh.wave, "WAVE", 4); strncpy(wavh.fmt, "fmt ", 4); strncpy(wavh.data, "data", 4); wavh.chunk_size = 16; wavh.format_tag = 1; // PCM wavh.num_chans = 1; // mono wavh.srate = RATE; wavh.bytes_per_sec = (RATE * 1 * 16 * 1) / 8; wavh.bytes_per_samp = 2; wavh.bits_per_samp = 16; wavh.dlength = RATE * 2 * 1 * 16 / 2; wavh.flength = wavh.dlength + 44; _writer.writeSfudBuffer((byte *)&wavh, 44); }Цей код визначає заголовок WAV як структуру, яка займає 44 байти пам'яті. Він записує деталі про частоту, розмір і кількість каналів аудіофайлу. Цей заголовок потім записується у флеш-пам'ять.
-
Нижче цього коду додайте наступне для оголошення методу, який буде викликаний, коли буфери аудіо готові до обробки:
void audioCallback(uint16_t *buf, uint32_t buf_len) { static uint32_t idx = 44; if (_isRecording) { for (uint32_t i = 0; i < buf_len; i++) { int16_t audio_value = ((int16_t)buf[i] - 2048) * 16; _writer.writeSfudBuffer(audio_value & 0xFF); _writer.writeSfudBuffer((audio_value >> 8) & 0xFF); } idx += buf_len; if (idx >= BUFFER_SIZE) { _writer.flushSfudBuffer(); idx = 44; _isRecording = false; _isRecordingReady = true; } } }Буфери аудіо - це масиви 16-бітних цілих чисел, що містять аудіо з ADC. ADC повертає 12-бітні беззнакові значення (0-1023), тому їх потрібно перетворити на 16-бітні знакові значення, а потім перетворити на 2 байти для збереження як сирих бінарних даних.
Ці байти записуються у буфери флеш-пам'яті. Запис починається з індексу 44 - це зміщення від 44 байтів, записаних як заголовок WAV-файлу. Після того, як всі байти, необхідні для потрібної тривалості аудіо, захоплені, залишкові дані записуються у флеш-пам'ять.
-
У секції
publicкласуMicдодайте наступний код:void dmaHandler() { static uint8_t count = 0; if (DMAC->Channel[1].CHINTFLAG.bit.SUSP) { DMAC->Channel[1].CHCTRLB.reg = DMAC_CHCTRLB_CMD_RESUME; DMAC->Channel[1].CHINTFLAG.bit.SUSP = 1; if (count) { audioCallback(_adc_buf_0, ADC_BUF_LEN); } else { audioCallback(_adc_buf_1, ADC_BUF_LEN); } count = (count + 1) % 2; } }Цей код буде викликаний DMAC, щоб повідомити ваш код про готовність буферів до обробки. Він перевіряє, чи є дані для обробки, і викликає метод
audioCallbackз відповідним буфером. -
Зовні класу, після оголошення
Mic mic;, додайте наступний код:void DMAC_1_Handler() { mic.dmaHandler(); }DMAC_1_Handlerбуде викликаний DMAC, коли буфери готові до обробки. Ця функція знаходиться за назвою, тому просто повинна існувати, щоб бути викликаною. -
Додайте наступні два методи до секції
publicкласуMic:void init() { analogReference(AR_INTERNAL2V23); _writer.init(); initBufferHeader(); configureDmaAdc(); } void reset() { _isRecordingReady = false; _isRecording = false; _writer.reset(); initBufferHeader(); }Метод
initмістить код для ініціалізації класуMic. Цей метод встановлює правильну напругу для піну мікрофона, налаштовує записувач флеш-пам'яті, записує заголовок WAV-файлу і налаштовує DMAC. Методresetскидає флеш-пам'ять і повторно записує заголовок після того, як аудіо було захоплено і використано.
Завдання - захоплення аудіо
-
У файлі
main.cppдодайте директиву включення для заголовкового файлуmic.h:#include "mic.h" -
У функції
setupініціалізуйте кнопку C. Захоплення аудіо почнеться, коли ця кнопка буде натиснута, і триватиме 4 секунди:pinMode(WIO_KEY_C, INPUT_PULLUP); -
Нижче цього ініціалізуйте мікрофон, а потім виведіть у консоль повідомлення про готовність до захоплення аудіо:
mic.init(); Serial.println("Ready."); -
Над функцією
loopвизначте функцію для обробки захопленого аудіо. Наразі вона нічого не робить, але пізніше в цьому уроці вона буде використовуватися для перетворення мовлення у текст:void processAudio() { } -
Додайте наступне до функції
loop:void loop() { if (digitalRead(WIO_KEY_C) == LOW && !mic.isRecording()) { Serial.println("Starting recording..."); mic.startRecording(); } if (!mic.isRecording() && mic.isRecordingReady()) { Serial.println("Finished recording"); processAudio(); mic.reset(); } }Цей код перевіряє кнопку C, і якщо вона натиснута і запис ще не розпочато, то поле
_isRecordingкласуMicвстановлюється у true. Це призведе до того, що методaudioCallbackкласуMicбуде зберігати аудіо, поки не буде захоплено 4 секунди. Після того, як 4 секунди аудіо були захоплені, поле_isRecordingвстановлюється у false, а поле_isRecordingReadyвстановлюється у true. Це потім перевіряється у функціїloop, і коли значення true, викликається функціяprocessAudio, а потім клас мікрофона скидається. -
Зберіть цей код, завантажте його на ваш Wio Terminal і протестуйте через серійний монітор. Натисніть кнопку C (ту, що зліва, найближче до перемикача живлення) і говоріть. Буде захоплено 4 секунди аудіо.
--- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time --- More details at http://bit.ly/pio-monitor-filters --- Miniterm on /dev/cu.usbmodem1101 9600,8,N,1 --- --- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- Ready. Starting recording... Finished recording
💁 Ви можете знайти цей код у папці code-record/wio-terminal. Ваш додаток для запису аудіо став успішним!
Відмова від відповідальності:
Цей документ був перекладений за допомогою сервісу автоматичного перекладу Co-op Translator. Хоча ми прагнемо до точності, будь ласка, майте на увазі, що автоматичні переклади можуть містити помилки або неточності. Оригінальний документ на його рідній мові слід вважати авторитетним джерелом. Для критичної інформації рекомендується професійний людський переклад. Ми не несемо відповідальності за будь-які непорозуміння або неправильні тлумачення, що виникають внаслідок використання цього перекладу.