38 KiB
บันทึกเสียง - Wio Terminal
ในส่วนนี้ของบทเรียน คุณจะเขียนโค้ดเพื่อบันทึกเสียงบน Wio Terminal ของคุณ การบันทึกเสียงจะถูกควบคุมโดยหนึ่งในปุ่มที่อยู่ด้านบนของ Wio Terminal
เขียนโปรแกรมเพื่อบันทึกเสียง
คุณสามารถบันทึกเสียงจากไมโครโฟนโดยใช้โค้ด C++ Wio Terminal มี RAM เพียง 192KB ซึ่งไม่เพียงพอที่จะบันทึกเสียงได้นานเกินสองสามวินาที แต่มีหน่วยความจำแฟลชขนาด 4MB ซึ่งสามารถใช้แทนได้ โดยบันทึกเสียงที่บันทึกไว้ลงในหน่วยความจำแฟลช
ไมโครโฟนในตัวจะบันทึกสัญญาณอนาล็อก ซึ่งจะถูกแปลงเป็นสัญญาณดิจิทัลที่ Wio Terminal สามารถใช้งานได้ เมื่อบันทึกเสียง ข้อมูลจะต้องถูกบันทึกในเวลาที่เหมาะสม เช่น หากต้องการบันทึกเสียงที่ 16KHz จะต้องบันทึกเสียง 16,000 ครั้งต่อวินาที โดยมีช่วงเวลาที่เท่ากันระหว่างแต่ละตัวอย่าง แทนที่จะใช้โค้ดของคุณทำสิ่งนี้ คุณสามารถใช้ตัวควบคุมการเข้าถึงหน่วยความจำโดยตรง (DMAC) ซึ่งเป็นวงจรที่สามารถบันทึกสัญญาณจากที่ใดที่หนึ่งและเขียนลงในหน่วยความจำ โดยไม่รบกวนโค้ดที่กำลังทำงานบนโปรเซสเซอร์
✅ อ่านเพิ่มเติมเกี่ยวกับ DMA ได้ที่ หน้าการเข้าถึงหน่วยความจำโดยตรงบน Wikipedia
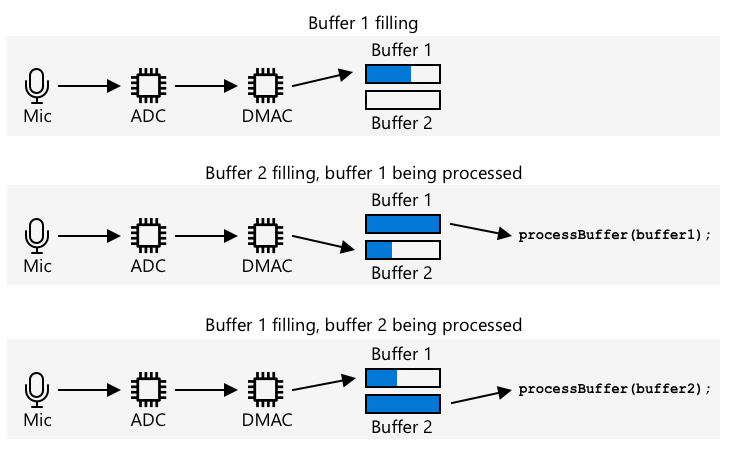
DMAC สามารถบันทึกเสียงจาก ADC ในช่วงเวลาที่กำหนด เช่น 16,000 ครั้งต่อวินาทีสำหรับเสียง 16KHz มันสามารถเขียนข้อมูลที่บันทึกไว้ลงในบัฟเฟอร์หน่วยความจำที่จัดสรรไว้ล่วงหน้า และเมื่อบัฟเฟอร์นี้เต็ม จะทำให้โค้ดของคุณสามารถประมวลผลได้ การใช้หน่วยความจำนี้อาจทำให้การบันทึกเสียงล่าช้า แต่คุณสามารถตั้งค่าบัฟเฟอร์หลายตัวได้ DMAC จะเขียนลงในบัฟเฟอร์ 1 และเมื่อเต็ม จะส่งการแจ้งเตือนให้โค้ดของคุณประมวลผลบัฟเฟอร์ 1 ในขณะที่ DMAC เขียนลงในบัฟเฟอร์ 2 เมื่อบัฟเฟอร์ 2 เต็ม จะส่งการแจ้งเตือนให้โค้ดของคุณ และกลับไปเขียนลงในบัฟเฟอร์ 1 ด้วยวิธีนี้ ตราบใดที่คุณประมวลผลแต่ละบัฟเฟอร์ในเวลาที่น้อยกว่าที่ใช้ในการเติมบัฟเฟอร์ คุณจะไม่สูญเสียข้อมูลใดๆ
เมื่อแต่ละบัฟเฟอร์ถูกบันทึกแล้ว สามารถเขียนลงในหน่วยความจำแฟลชได้ หน่วยความจำแฟลชต้องเขียนโดยใช้ที่อยู่ที่กำหนด โดยระบุว่าจะเขียนที่ไหนและขนาดที่เขียน คล้ายกับการอัปเดตอาร์เรย์ของไบต์ในหน่วยความจำ หน่วยความจำแฟลชมีความละเอียด หมายความว่าการลบและการเขียนต้องไม่เพียงแต่มีขนาดคงที่ แต่ยังต้องจัดตำแหน่งให้ตรงกับขนาดนั้นด้วย ตัวอย่างเช่น หากความละเอียดคือ 4096 ไบต์ และคุณขอลบที่อยู่ 4200 อาจลบข้อมูลทั้งหมดตั้งแต่ที่อยู่ 4096 ถึง 8192 ซึ่งหมายความว่าเมื่อคุณเขียนข้อมูลเสียงลงในหน่วยความจำแฟลช จะต้องเป็นชิ้นส่วนที่มีขนาดถูกต้อง
งาน - ตั้งค่าหน่วยความจำแฟลช
-
สร้างโปรเจกต์ Wio Terminal ใหม่โดยใช้ PlatformIO ตั้งชื่อโปรเจกต์นี้ว่า
smart-timerเพิ่มโค้ดในฟังก์ชันsetupเพื่อกำหนดค่าพอร์ตอนุกรม -
เพิ่มไลบรารีที่จำเป็นต่อไปนี้ลงในไฟล์
platformio.iniเพื่อให้สามารถเข้าถึงหน่วยความจำแฟลช:lib_deps = seeed-studio/Seeed Arduino FS @ 2.1.1 seeed-studio/Seeed Arduino SFUD @ 2.0.2 -
เปิดไฟล์
main.cppและเพิ่มคำสั่ง include สำหรับไลบรารีหน่วยความจำแฟลชที่ด้านบนของไฟล์:#include <sfud.h> #include <SPI.h>🎓 SFUD ย่อมาจาก Serial Flash Universal Driver และเป็นไลบรารีที่ออกแบบมาเพื่อทำงานกับชิปหน่วยความจำแฟลชทุกประเภท
-
ในฟังก์ชัน
setupเพิ่มโค้ดต่อไปนี้เพื่อกำหนดค่าไลบรารีหน่วยความจำแฟลช:while (!(sfud_init() == SFUD_SUCCESS)) ; sfud_qspi_fast_read_enable(sfud_get_device(SFUD_W25Q32_DEVICE_INDEX), 2);โค้ดนี้จะวนซ้ำจนกว่าไลบรารี SFUD จะถูกเริ่มต้นใช้งาน จากนั้นเปิดการอ่านแบบรวดเร็ว หน่วยความจำแฟลชในตัวสามารถเข้าถึงได้โดยใช้ Queued Serial Peripheral Interface (QSPI) ซึ่งเป็นตัวควบคุม SPI ประเภทหนึ่งที่อนุญาตให้เข้าถึงอย่างต่อเนื่องผ่านคิวโดยใช้โปรเซสเซอร์น้อยที่สุด สิ่งนี้ทำให้การอ่านและเขียนหน่วยความจำแฟลชเร็วขึ้น
-
สร้างไฟล์ใหม่ในโฟลเดอร์
srcชื่อflash_writer.h -
เพิ่มโค้ดต่อไปนี้ที่ด้านบนของไฟล์นี้:
#pragma once #include <Arduino.h> #include <sfud.h>โค้ดนี้รวมไฟล์ header ที่จำเป็นบางไฟล์ รวมถึงไฟล์ header สำหรับไลบรารี SFUD เพื่อโต้ตอบกับหน่วยความจำแฟลช
-
กำหนดคลาสในไฟล์ header ใหม่นี้ชื่อ
FlashWriter:class FlashWriter { public: private: }; -
ในส่วน
privateเพิ่มโค้ดต่อไปนี้:byte *_sfudBuffer; size_t _sfudBufferSize; size_t _sfudBufferPos; size_t _sfudBufferWritePos; const sfud_flash *_flash;โค้ดนี้กำหนดฟิลด์บางส่วนสำหรับบัฟเฟอร์ที่จะใช้ในการจัดเก็บข้อมูลก่อนที่จะเขียนลงในหน่วยความจำแฟลช มีอาร์เรย์ไบต์
_sfudBufferเพื่อเขียนข้อมูล และเมื่อเต็ม ข้อมูลจะถูกเขียนลงในหน่วยความจำแฟลช ฟิลด์_sfudBufferPosจะเก็บตำแหน่งปัจจุบันที่จะเขียนในบัฟเฟอร์นี้ และ_sfudBufferWritePosจะเก็บตำแหน่งในหน่วยความจำแฟลชที่จะเขียน_flashเป็นตัวชี้ไปยังหน่วยความจำแฟลชที่จะเขียน - ไมโครคอนโทรลเลอร์บางตัวมีชิปหน่วยความจำแฟลชหลายตัว -
เพิ่มเมธอดต่อไปนี้ในส่วน
publicเพื่อเริ่มต้นคลาสนี้:void init() { _flash = sfud_get_device_table() + 0; _sfudBufferSize = _flash->chip.erase_gran; _sfudBuffer = new byte[_sfudBufferSize]; _sfudBufferPos = 0; _sfudBufferWritePos = 0; }โค้ดนี้กำหนดค่าหน่วยความจำแฟลชบน Wio Terminal เพื่อเขียน และตั้งค่าบัฟเฟอร์ตามขนาดของหน่วยความจำแฟลช โค้ดนี้อยู่ในเมธอด
initแทนที่จะเป็น constructor เนื่องจากต้องเรียกใช้หลังจากหน่วยความจำแฟลชถูกตั้งค่าในฟังก์ชันsetup -
เพิ่มโค้ดต่อไปนี้ในส่วน
public:void writeSfudBuffer(byte b) { _sfudBuffer[_sfudBufferPos++] = b; if (_sfudBufferPos == _sfudBufferSize) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } } void writeSfudBuffer(byte *b, size_t len) { for (size_t i = 0; i < len; ++i) { writeSfudBuffer(b[i]); } } void flushSfudBuffer() { if (_sfudBufferPos > 0) { sfud_erase_write(_flash, _sfudBufferWritePos, _sfudBufferSize, _sfudBuffer); _sfudBufferWritePos += _sfudBufferSize; _sfudBufferPos = 0; } }โค้ดนี้กำหนดเมธอดเพื่อเขียนไบต์ลงในระบบจัดเก็บข้อมูลแฟลช มันทำงานโดยการเขียนลงในบัฟเฟอร์ในหน่วยความจำที่มีขนาดเหมาะสมสำหรับหน่วยความจำแฟลช และเมื่อเต็ม จะเขียนลงในหน่วยความจำแฟลช โดยลบข้อมูลที่มีอยู่ในตำแหน่งนั้น นอกจากนี้ยังมี
flushSfudBufferเพื่อเขียนบัฟเฟอร์ที่ไม่สมบูรณ์ เนื่องจากข้อมูลที่บันทึกจะไม่เป็นจำนวนเท่าของขนาดหน่วยความจำแฟลช ดังนั้นส่วนท้ายของข้อมูลจะต้องถูกเขียน💁 ส่วนท้ายของข้อมูลจะเขียนข้อมูลที่ไม่ต้องการเพิ่มเติม แต่ไม่เป็นไรเพราะจะอ่านเฉพาะข้อมูลที่ต้องการเท่านั้น
งาน - ตั้งค่าการบันทึกเสียง
-
สร้างไฟล์ใหม่ในโฟลเดอร์
srcชื่อconfig.h -
เพิ่มโค้ดต่อไปนี้ที่ด้านบนของไฟล์นี้:
#pragma once #define RATE 16000 #define SAMPLE_LENGTH_SECONDS 4 #define SAMPLES RATE * SAMPLE_LENGTH_SECONDS #define BUFFER_SIZE (SAMPLES * 2) + 44 #define ADC_BUF_LEN 1600โค้ดนี้ตั้งค่าค่าคงที่บางอย่างสำหรับการบันทึกเสียง
ค่าคงที่ ค่า คำอธิบาย RATE 16000 อัตราการสุ่มตัวอย่างสำหรับเสียง 16,000 คือ 16KHz SAMPLE_LENGTH_SECONDS 4 ความยาวของเสียงที่จะบันทึก ตั้งค่าเป็น 4 วินาที หากต้องการบันทึกเสียงนานขึ้น ให้เพิ่มค่านี้ SAMPLES 64000 จำนวนตัวอย่างเสียงทั้งหมดที่จะบันทึก ตั้งค่าเป็นอัตราการสุ่มตัวอย่าง * จำนวนวินาที BUFFER_SIZE 128044 ขนาดของบัฟเฟอร์เสียงที่จะบันทึก เสียงจะถูกบันทึกเป็นไฟล์ WAV ซึ่งมีส่วนหัว 44 ไบต์ และข้อมูลเสียง 128,000 ไบต์ (แต่ละตัวอย่างมี 2 ไบต์) ADC_BUF_LEN 1600 ขนาดของบัฟเฟอร์ที่จะใช้ในการบันทึกเสียงจาก DMAC 💁 หากคุณพบว่า 4 วินาทีสั้นเกินไปสำหรับการขอจับเวลา คุณสามารถเพิ่มค่าของ
SAMPLE_LENGTH_SECONDSและค่าทั้งหมดจะถูกคำนวณใหม่ -
สร้างไฟล์ใหม่ในโฟลเดอร์
srcชื่อmic.h -
เพิ่มโค้ดต่อไปนี้ที่ด้านบนของไฟล์นี้:
#pragma once #include <Arduino.h> #include "config.h" #include "flash_writer.h"โค้ดนี้รวมไฟล์ header ที่จำเป็นบางไฟล์ รวมถึงไฟล์ header
config.hและFlashWriter -
เพิ่มโค้ดต่อไปนี้เพื่อกำหนดคลาส
Micที่สามารถบันทึกเสียงจากไมโครโฟน:class Mic { public: Mic() { _isRecording = false; _isRecordingReady = false; } void startRecording() { _isRecording = true; _isRecordingReady = false; } bool isRecording() { return _isRecording; } bool isRecordingReady() { return _isRecordingReady; } private: volatile bool _isRecording; volatile bool _isRecordingReady; FlashWriter _writer; }; Mic mic;คลาสนี้มีฟิลด์เพียงไม่กี่ตัวเพื่อบันทึกว่าการบันทึกเริ่มต้นหรือไม่ และการบันทึกพร้อมใช้งานหรือไม่ เมื่อ DMAC ถูกตั้งค่า มันจะเขียนลงในบัฟเฟอร์หน่วยความจำอย่างต่อเนื่อง ดังนั้นตัวแปร
_isRecordingจะกำหนดว่าควรประมวลผลหรือไม่_isRecordingReadyจะถูกตั้งค่าเมื่อบันทึกเสียงครบ 4 วินาที_writerใช้ในการบันทึกข้อมูลเสียงลงในหน่วยความจำแฟลชจากนั้นตัวแปร global จะถูกประกาศสำหรับอินสแตนซ์ของคลาส
Mic -
เพิ่มโค้ดต่อไปนี้ในส่วน
privateของคลาสMic:typedef struct { uint16_t btctrl; uint16_t btcnt; uint32_t srcaddr; uint32_t dstaddr; uint32_t descaddr; } dmacdescriptor; // Globals - DMA and ADC volatile dmacdescriptor _wrb[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor_section[DMAC_CH_NUM] __attribute__((aligned(16))); dmacdescriptor _descriptor __attribute__((aligned(16))); void configureDmaAdc() { // Configure DMA to sample from ADC at a regular interval (triggered by timer/counter) DMAC->BASEADDR.reg = (uint32_t)_descriptor_section; // Specify the location of the descriptors DMAC->WRBADDR.reg = (uint32_t)_wrb; // Specify the location of the write back descriptors DMAC->CTRL.reg = DMAC_CTRL_DMAENABLE | DMAC_CTRL_LVLEN(0xf); // Enable the DMAC peripheral DMAC->Channel[1].CHCTRLA.reg = DMAC_CHCTRLA_TRIGSRC(TC5_DMAC_ID_OVF) | // Set DMAC to trigger on TC5 timer overflow DMAC_CHCTRLA_TRIGACT_BURST; // DMAC burst transfer _descriptor.descaddr = (uint32_t)&_descriptor_section[1]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_0 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_0 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[0], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section _descriptor.descaddr = (uint32_t)&_descriptor_section[0]; // Set up a circular descriptor _descriptor.srcaddr = (uint32_t)&ADC1->RESULT.reg; // Take the result from the ADC0 RESULT register _descriptor.dstaddr = (uint32_t)_adc_buf_1 + sizeof(uint16_t) * ADC_BUF_LEN; // Place it in the adc_buf_1 array _descriptor.btcnt = ADC_BUF_LEN; // Beat count _descriptor.btctrl = DMAC_BTCTRL_BEATSIZE_HWORD | // Beat size is HWORD (16-bits) DMAC_BTCTRL_DSTINC | // Increment the destination address DMAC_BTCTRL_VALID | // Descriptor is valid DMAC_BTCTRL_BLOCKACT_SUSPEND; // Suspend DMAC channel 0 after block transfer memcpy(&_descriptor_section[1], &_descriptor, sizeof(_descriptor)); // Copy the descriptor to the descriptor section // Configure NVIC NVIC_SetPriority(DMAC_1_IRQn, 0); // Set the Nested Vector Interrupt Controller (NVIC) priority for DMAC1 to 0 (highest) NVIC_EnableIRQ(DMAC_1_IRQn); // Connect DMAC1 to Nested Vector Interrupt Controller (NVIC) // Activate the suspend (SUSP) interrupt on DMAC channel 1 DMAC->Channel[1].CHINTENSET.reg = DMAC_CHINTENSET_SUSP; // Configure ADC ADC1->INPUTCTRL.bit.MUXPOS = ADC_INPUTCTRL_MUXPOS_AIN12_Val; // Set the analog input to ADC0/AIN2 (PB08 - A4 on Metro M4) while (ADC1->SYNCBUSY.bit.INPUTCTRL) ; // Wait for synchronization ADC1->SAMPCTRL.bit.SAMPLEN = 0x00; // Set max Sampling Time Length to half divided ADC clock pulse (2.66us) while (ADC1->SYNCBUSY.bit.SAMPCTRL) ; // Wait for synchronization ADC1->CTRLA.reg = ADC_CTRLA_PRESCALER_DIV128; // Divide Clock ADC GCLK by 128 (48MHz/128 = 375kHz) ADC1->CTRLB.reg = ADC_CTRLB_RESSEL_12BIT | // Set ADC resolution to 12 bits ADC_CTRLB_FREERUN; // Set ADC to free run mode while (ADC1->SYNCBUSY.bit.CTRLB) ; // Wait for synchronization ADC1->CTRLA.bit.ENABLE = 1; // Enable the ADC while (ADC1->SYNCBUSY.bit.ENABLE) ; // Wait for synchronization ADC1->SWTRIG.bit.START = 1; // Initiate a software trigger to start an ADC conversion while (ADC1->SYNCBUSY.bit.SWTRIG) ; // Wait for synchronization // Enable DMA channel 1 DMAC->Channel[1].CHCTRLA.bit.ENABLE = 1; // Configure Timer/Counter 5 GCLK->PCHCTRL[TC5_GCLK_ID].reg = GCLK_PCHCTRL_CHEN | // Enable peripheral channel for TC5 GCLK_PCHCTRL_GEN_GCLK1; // Connect generic clock 0 at 48MHz TC5->COUNT16.WAVE.reg = TC_WAVE_WAVEGEN_MFRQ; // Set TC5 to Match Frequency (MFRQ) mode TC5->COUNT16.CC[0].reg = 3000 - 1; // Set the trigger to 16 kHz: (4Mhz / 16000) - 1 while (TC5->COUNT16.SYNCBUSY.bit.CC0) ; // Wait for synchronization // Start Timer/Counter 5 TC5->COUNT16.CTRLA.bit.ENABLE = 1; // Enable the TC5 timer while (TC5->COUNT16.SYNCBUSY.bit.ENABLE) ; // Wait for synchronization } uint16_t _adc_buf_0[ADC_BUF_LEN]; uint16_t _adc_buf_1[ADC_BUF_LEN];โค้ดนี้กำหนดเมธอด
configureDmaAdcเพื่อกำหนดค่า DMAC โดยเชื่อมต่อกับ ADC และตั้งค่าให้เติมบัฟเฟอร์สองตัวที่สลับกัน_adc_buf_0และ_adc_buf_1💁 หนึ่งในข้อเสียของการพัฒนาไมโครคอนโทรลเลอร์คือความซับซ้อนของโค้ดที่จำเป็นในการโต้ตอบกับฮาร์ดแวร์ เนื่องจากโค้ดของคุณทำงานในระดับต่ำมากที่โต้ตอบกับฮาร์ดแวร์โดยตรง โค้ดนี้ซับซ้อนกว่าที่คุณจะเขียนสำหรับคอมพิวเตอร์บอร์ดเดียวหรือคอมพิวเตอร์เดสก์ท็อป เนื่องจากไม่มีระบบปฏิบัติการช่วยเหลือ มีไลบรารีบางตัวที่สามารถทำให้สิ่งนี้ง่ายขึ้น แต่ก็ยังมีความซับซ้อนอยู่
-
ด้านล่างนี้ เพิ่มโค้ดต่อไปนี้:
// WAV files have a header. This struct defines that header struct wavFileHeader { char riff[4]; /* "RIFF" */ long flength; /* file length in bytes */ char wave[4]; /* "WAVE" */ char fmt[4]; /* "fmt " */ long chunk_size; /* size of FMT chunk in bytes (usually 16) */ short format_tag; /* 1=PCM, 257=Mu-Law, 258=A-Law, 259=ADPCM */ short num_chans; /* 1=mono, 2=stereo */ long srate; /* Sampling rate in samples per second */ long bytes_per_sec; /* bytes per second = srate*bytes_per_samp */ short bytes_per_samp; /* 2=16-bit mono, 4=16-bit stereo */ short bits_per_samp; /* Number of bits per sample */ char data[4]; /* "data" */ long dlength; /* data length in bytes (filelength - 44) */ }; void initBufferHeader() { wavFileHeader wavh; strncpy(wavh.riff, "RIFF", 4); strncpy(wavh.wave, "WAVE", 4); strncpy(wavh.fmt, "fmt ", 4); strncpy(wavh.data, "data", 4); wavh.chunk_size = 16; wavh.format_tag = 1; // PCM wavh.num_chans = 1; // mono wavh.srate = RATE; wavh.bytes_per_sec = (RATE * 1 * 16 * 1) / 8; wavh.bytes_per_samp = 2; wavh.bits_per_samp = 16; wavh.dlength = RATE * 2 * 1 * 16 / 2; wavh.flength = wavh.dlength + 44; _writer.writeSfudBuffer((byte *)&wavh, 44); }โค้ดนี้กำหนดส่วนหัว WAV เป็น struct ที่ใช้หน่วยความจำ 44 ไบต์ มันเขียนรายละเอียดเกี่ยวกับอัตราไฟล์เสียง ขนาด และจำนวนช่อง จากนั้นส่วนหัวนี้จะถูกเขียนลงในหน่วยความจำแฟลช
-
ด้านล่างโค้ดนี้ เพิ่มโค้ดต่อไปนี้เพื่อประกาศเมธอดที่จะถูกเรียกเมื่อบัฟเฟอร์เสียงพร้อมที่จะประมวลผล:
void audioCallback(uint16_t *buf, uint32_t buf_len) { static uint32_t idx = 44; if (_isRecording) { for (uint32_t i = 0; i < buf_len; i++) { int16_t audio_value = ((int16_t)buf[i] - 2048) * 16; _writer.writeSfudBuffer(audio_value & 0xFF); _writer.writeSfudBuffer((audio_value >> 8) & 0xFF); } idx += buf_len; if (idx >= BUFFER_SIZE) { _writer.flushSfudBuffer(); idx = 44; _isRecording = false; _isRecordingReady = true; } } }บัฟเฟอร์เสียงเป็นอาร์เรย์ของตัวเลข 16 บิตที่มีเสียงจาก ADC ADC จะส่งคืนค่าที่ไม่ได้ลงนาม 12 บิต (0-1023) ดังนั้นค่าต้องถูกแปลงเป็นค่าที่ลงนาม 16 บิต และจากนั้นแปลงเป็น 2 ไบต์เพื่อจัดเก็บเป็นข้อมูลไบนารีดิบ
ไบต์เหล่านี้จะถูกเขียนลงในบัฟเฟอร์หน่วยความจำแฟลช การเขียนเริ่มต้นที่ดัชนี 44 - นี่คือการชดเชยจาก 44 ไบต์ที่เขียนเป็นส่วนหัวไฟล์ WAV เมื่อบันทึกไบต์ทั้งหมดที่จำเป็นสำหรับความยาวเสียงที่ต้องการแล้ว ข้อมูลที่เหลือจะถูกเขียนลงในหน่วยความจำแฟลช
-
ในส่วน
publicของคลาสMicเพิ่มโค้ดต่อไปนี้:void dmaHandler() { static uint8_t count = 0; if (DMAC->Channel[1].CHINTFLAG.bit.SUSP) { DMAC->Channel[1].CHCTRLB.reg = DMAC_CHCTRLB_CMD_RESUME; DMAC->Channel[1].CHINTFLAG.bit.SUSP = 1; if (count) { audioCallback(_adc_buf_0, ADC_BUF_LEN); } else { audioCallback(_adc_buf_1, ADC_BUF_LEN); } count = (count + 1) % 2; } }โค้ดนี้จะถูกเรียกโดย DMAC เพื่อบอกโค้ดของคุณให้ประมวลผลบัฟเฟอร์ มันตรวจสอบว่ามีข้อมูลให้ประมวลผลหรือไม่ และเรียกเมธอด
audioCallbackพร้อมบัฟเฟอร์ที่เกี่ยวข้อง -
นอกคลาส หลังจากการประกาศ
Mic mic;เพิ่มโค้ดต่อไปนี้:void DMAC_1_Handler() { mic.dmaHandler(); }DMAC_1_Handlerจะถูกเรียกโดย DMAC เมื่อบัฟเฟอร์พร้อมที่จะประมวลผล ฟังก์ชันนี้จะถูกค้นหาตามชื่อ ดังนั้นเพียงแค่ต้องมีอยู่เพื่อให้ถูกเรียก -
เพิ่มเมธอดสองตัวต่อไปนี้ในส่วน
publicของคลาสMic:void init() { analogReference(AR_INTERNAL2V23); _writer.init(); initBufferHeader(); configureDmaAdc(); } void reset() { _isRecordingReady = false; _isRecording = false; _writer.reset(); initBufferHeader(); }เมธอด
initมีโค้ดเพื่อเริ่มต้นคลาสMicเมธอดนี้ตั้งค่าแรงดันไฟฟ้าที่ถูกต้องสำหรับพินไมโครโฟน ตั้งค่าตัวเขียนหน่วยความจำแฟลช เขียนส่วนหัวไฟล์ WAV และกำหนดค่า DMAC เมธอดresetจะรีเซ็ตหน่วยความจำแฟลชและเขียนส่วนหัวใหม่หลังจากที่เสียงถูกบันทึกและใช้งานแล้ว
งาน - บันทึกเสียง
-
ในไฟล์
main.cppเพิ่มคำสั่ง include สำหรับไฟล์ headermic.h:#include "mic.h" -
ในฟังก์ชัน
setupกำหนดค่าปุ่ม C การบันทึกเสียงจะเริ่มต้นเมื่อกดปุ่มนี้ และดำเนินต่อไปเป็นเวลา 4 วินาที:pinMode(WIO_KEY_C, INPUT_PULLUP); -
ด้านล่างนี้ เริ่มต้นไมโครโฟน จากนั้นพิมพ์ไปยังคอนโซลว่าเสียงพร้อมที่จะบันทึก:
mic.init(); Serial.println("Ready."); -
เหนือฟังก์ชัน
loopกำหนดฟังก์ชันเพื่อประมวลผลเสียงที่บันทึกไว้ สำหรับตอนนี้ฟังก์ชันนี้จะไม่ทำอะไร แต่ในบทเรียนนี้จะส่งเสียงเพื่อแปลงเป็นข้อความ:void processAudio() { } -
เพิ่มโค้ดต่อไปนี้ในฟังก์ชัน
loop:void loop() { if (digitalRead(WIO_KEY_C) == LOW && !mic.isRecording()) { Serial.println("Starting recording..."); mic.startRecording(); } if (!mic.isRecording() && mic.isRecordingReady()) { Serial.println("Finished recording"); processAudio(); mic.reset(); } }โค้ดนี้ตรวจสอบปุ่ม C และหากกดปุ่มนี้และยังไม่ได้เริ่มการบันทึก ตัวแปร
_isRecordingของคลาสMicจะถูกตั้งค่าเป็น true สิ่งนี้จะทำให้เมธอดaudioCallbackของคลาสMicจัดเก็บเสียงจนกว่าจะบันทึกครบ 4 วินาที เมื่อบันทึกเสียงครบ 4 วินาที ตัวแปร_isRecordingจะถูกตั้งค่าเป็น false และตัวแปร_isRecordingReadyจะถูกตั้งค่าเป็น true จากนั้นจะถูกตรวจสอบในฟังก์ชันloopและเมื่อเป็น true ฟังก์ชันprocessAudioจะถูกเรียก จากนั้นคลาสMicจะถูกรีเซ็ต -
สร้างโค้ดนี้ อัปโหลดไปยัง Wio Terminal ของคุณ และทดสอบผ่าน serial monitor กดปุ่ม C (ปุ่มที่อยู่ด้านซ้ายมือ ใกล้กับสวิตช์เปิดปิด) และพูด เสียง 4 วินาทีจะถูกบันทึก
--- Available filters and text transformations: colorize, debug, default, direct, hexlify, log2file, nocontrol, printable, send_on_enter, time --- More details at http://bit.ly/pio-monitor-filters --- Miniterm on /dev/cu.usbmodem1101 9600,8,N,1 --- --- Quit: Ctrl+C | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- Ready. Starting recording... Finished recording
💁 คุณสามารถค้นหาโค้ดนี้ได้ในโฟลเดอร์ code-record/wio-terminal 😀 โปรแกรมบันทึกเสียงของคุณประสบความสำเร็จ!
ข้อจำกัดความรับผิดชอบ:
เอกสารนี้ได้รับการแปลโดยใช้บริการแปลภาษา AI Co-op Translator แม้ว่าเราจะพยายามให้การแปลมีความถูกต้องมากที่สุด แต่โปรดทราบว่าการแปลอัตโนมัติอาจมีข้อผิดพลาดหรือความไม่ถูกต้อง เอกสารต้นฉบับในภาษาดั้งเดิมควรถือเป็นแหล่งข้อมูลที่เชื่อถือได้ สำหรับข้อมูลที่สำคัญ ขอแนะนำให้ใช้บริการแปลภาษามืออาชีพ เราไม่รับผิดชอบต่อความเข้าใจผิดหรือการตีความผิดที่เกิดจากการใช้การแปลนี้