8.9 KiB
ตรวจจับความใกล้ - Wio Terminal
ในส่วนนี้ของบทเรียน คุณจะเพิ่มเซ็นเซอร์วัดระยะทางให้กับ Wio Terminal และอ่านค่าระยะทางจากเซ็นเซอร์นั้น
ฮาร์ดแวร์
Wio Terminal ต้องการเซ็นเซอร์วัดระยะทาง
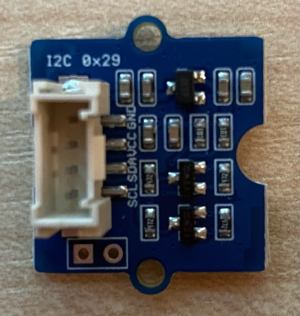
เซ็นเซอร์ที่คุณจะใช้คือ Grove Time of Flight distance sensor เซ็นเซอร์นี้ใช้โมดูลเลเซอร์สำหรับการวัดระยะทาง โดยมีช่วงการวัดตั้งแต่ 10 มม. ถึง 2000 มม. (1 ซม. - 2 ม.) และสามารถรายงานค่าในช่วงนี้ได้อย่างแม่นยำ โดยค่าที่เกิน 1000 มม. จะถูกรายงานเป็น 8109 มม.
เครื่องวัดระยะด้วยเลเซอร์จะอยู่ด้านหลังของเซ็นเซอร์ ซึ่งเป็นด้านตรงข้ามกับช่องเสียบ Grove
นี่คือเซ็นเซอร์แบบ I2C
เชื่อมต่อเซ็นเซอร์ Time of Flight
เซ็นเซอร์ Grove Time of Flight สามารถเชื่อมต่อกับ Wio Terminal ได้
งาน - เชื่อมต่อเซ็นเซอร์ Time of Flight
เชื่อมต่อเซ็นเซอร์ Time of Flight
-
เสียบปลายด้านหนึ่งของสาย Grove เข้ากับช่องเสียบของเซ็นเซอร์ Time of Flight สายจะเสียบได้เพียงด้านเดียว
-
เมื่อ Wio Terminal ไม่ได้เชื่อมต่อกับคอมพิวเตอร์หรือแหล่งจ่ายไฟอื่น ๆ ให้เชื่อมต่อปลายอีกด้านของสาย Grove เข้ากับช่องเสียบ Grove ด้านซ้ายของ Wio Terminal เมื่อมองที่หน้าจอ ช่องนี้อยู่ใกล้กับปุ่มเปิด/ปิดเครื่องมากที่สุด และเป็นช่องที่รองรับทั้งดิจิทัลและ I2C
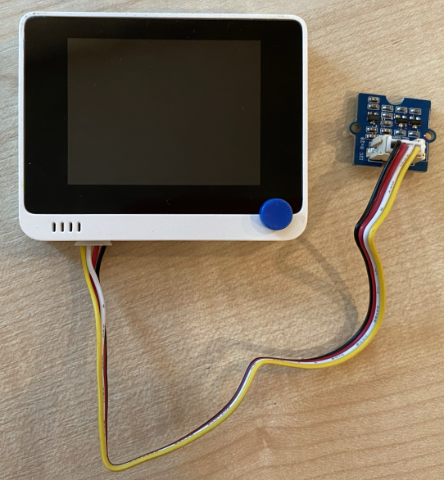
- ตอนนี้คุณสามารถเชื่อมต่อ Wio Terminal กับคอมพิวเตอร์ของคุณได้แล้ว
เขียนโปรแกรมสำหรับเซ็นเซอร์ Time of Flight
ตอนนี้ Wio Terminal สามารถเขียนโปรแกรมเพื่อใช้งานเซ็นเซอร์ Time of Flight ที่เชื่อมต่ออยู่ได้
งาน - เขียนโปรแกรมสำหรับเซ็นเซอร์ Time of Flight
-
สร้างโปรเจกต์ใหม่สำหรับ Wio Terminal โดยใช้ PlatformIO ตั้งชื่อโปรเจกต์นี้ว่า
distance-sensorเพิ่มโค้ดในฟังก์ชันsetupเพื่อกำหนดค่าพอร์ตอนุกรม -
เพิ่มการพึ่งพาไลบรารีสำหรับ Seeed Grove Time of Flight Distance Sensor ในไฟล์
platformio.iniของโปรเจกต์:lib_deps = seeed-studio/Grove Ranging sensor - VL53L0X @ ^1.1.1 -
ใน
main.cppเพิ่มโค้ดต่อไปนี้ใต้คำสั่ง include ที่มีอยู่แล้ว เพื่อประกาศอินสแตนซ์ของคลาสSeeed_vl53l0xสำหรับใช้งานกับเซ็นเซอร์ Time of Flight:#include "Seeed_vl53l0x.h" Seeed_vl53l0x VL53L0X; -
เพิ่มโค้ดต่อไปนี้ที่ด้านล่างของฟังก์ชัน
setupเพื่อเริ่มต้นเซ็นเซอร์:VL53L0X.VL53L0X_common_init(); VL53L0X.VL53L0X_high_accuracy_ranging_init(); -
ในฟังก์ชัน
loopอ่านค่าจากเซ็นเซอร์:VL53L0X_RangingMeasurementData_t RangingMeasurementData; memset(&RangingMeasurementData, 0, sizeof(VL53L0X_RangingMeasurementData_t)); VL53L0X.PerformSingleRangingMeasurement(&RangingMeasurementData);โค้ดนี้จะเริ่มต้นโครงสร้างข้อมูลเพื่ออ่านค่า จากนั้นส่งโครงสร้างข้อมูลนี้ไปยังเมธอด
PerformSingleRangingMeasurementซึ่งจะเติมค่าการวัดระยะทางลงไป -
ด้านล่างนี้ ให้เขียนค่าการวัดระยะทางออกมา จากนั้นหน่วงเวลา 1 วินาที:
Serial.print("Distance = "); Serial.print(RangingMeasurementData.RangeMilliMeter); Serial.println(" mm"); delay(1000); -
สร้าง อัปโหลด และรันโค้ดนี้ คุณจะสามารถเห็นค่าการวัดระยะทางใน Serial Monitor วางวัตถุใกล้กับเซ็นเซอร์ แล้วคุณจะเห็นค่าการวัดระยะทาง:
Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmเครื่องวัดระยะด้วยเลเซอร์อยู่ด้านหลังของเซ็นเซอร์ ดังนั้นให้แน่ใจว่าคุณใช้ด้านที่ถูกต้องเมื่อวัดระยะทาง

💁 คุณสามารถหาโค้ดนี้ได้ในโฟลเดอร์ code-proximity/wio-terminal
😀 โปรแกรมเซ็นเซอร์วัดระยะทางของคุณสำเร็จแล้ว!
ข้อจำกัดความรับผิดชอบ:
เอกสารนี้ได้รับการแปลโดยใช้บริการแปลภาษา AI Co-op Translator แม้ว่าเราจะพยายามให้การแปลมีความถูกต้องมากที่สุด แต่โปรดทราบว่าการแปลโดยอัตโนมัติอาจมีข้อผิดพลาดหรือความไม่ถูกต้อง เอกสารต้นฉบับในภาษาดั้งเดิมควรถือเป็นแหล่งข้อมูลที่เชื่อถือได้ สำหรับข้อมูลที่สำคัญ ขอแนะนำให้ใช้บริการแปลภาษามืออาชีพ เราไม่รับผิดชอบต่อความเข้าใจผิดหรือการตีความผิดที่เกิดจากการใช้การแปลนี้