14 KiB
อ่านข้อมูล GPS - Raspberry Pi
ในส่วนนี้ของบทเรียน คุณจะเพิ่มเซ็นเซอร์ GPS ให้กับ Raspberry Pi และอ่านค่าจากเซ็นเซอร์ดังกล่าว
ฮาร์ดแวร์
Raspberry Pi ต้องการเซ็นเซอร์ GPS
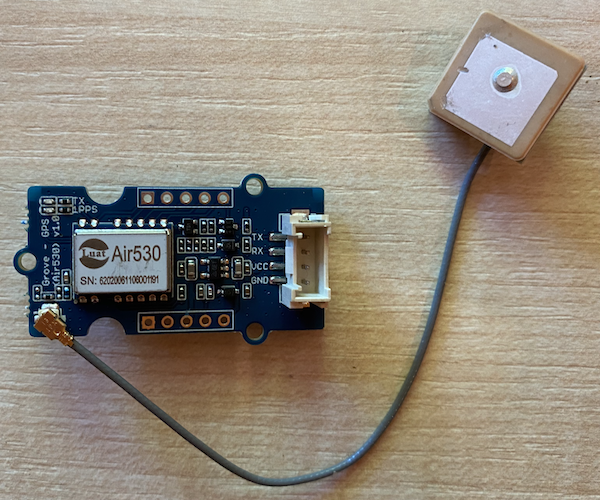
เซ็นเซอร์ที่คุณจะใช้คือ Grove GPS Air530 sensor เซ็นเซอร์นี้สามารถเชื่อมต่อกับระบบ GPS หลายระบบเพื่อให้ได้ตำแหน่งที่รวดเร็วและแม่นยำ เซ็นเซอร์นี้ประกอบด้วย 2 ส่วน - อุปกรณ์อิเล็กทรอนิกส์หลักของเซ็นเซอร์ และเสาอากาศภายนอกที่เชื่อมต่อด้วยสายบางๆ เพื่อรับคลื่นวิทยุจากดาวเทียม
นี่คือเซ็นเซอร์แบบ UART ซึ่งส่งข้อมูล GPS ผ่าน UART
เชื่อมต่อเซ็นเซอร์ GPS
เซ็นเซอร์ Grove GPS สามารถเชื่อมต่อกับ Raspberry Pi ได้
งาน - เชื่อมต่อเซ็นเซอร์ GPS
เชื่อมต่อเซ็นเซอร์ GPS
-
เสียบปลายด้านหนึ่งของสาย Grove เข้ากับช่องเสียบของเซ็นเซอร์ GPS สายจะเสียบได้เพียงด้านเดียวเท่านั้น
-
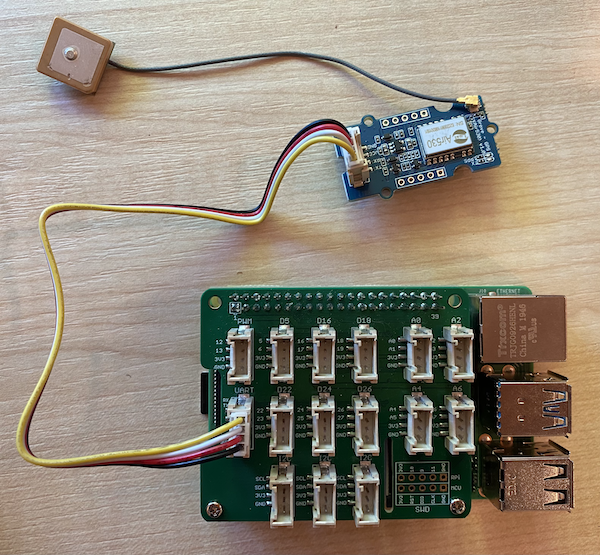
เมื่อ Raspberry Pi ปิดอยู่ ให้เชื่อมต่อปลายอีกด้านของสาย Grove เข้ากับช่อง UART ที่มีเครื่องหมาย UART บน Grove Base Hat ที่ติดตั้งอยู่บน Pi ช่องนี้อยู่ในแถวกลาง ด้านที่ใกล้กับช่องเสียบ SD Card ซึ่งอยู่ตรงข้ามกับพอร์ต USB และช่อง Ethernet
-
วางเซ็นเซอร์ GPS โดยให้เสาอากาศที่เชื่อมต่อมีทัศนวิสัยต่อท้องฟ้า - โดยเฉพาะใกล้หน้าต่างที่เปิดหรือภายนอก จะง่ายขึ้นในการรับสัญญาณที่ชัดเจนเมื่อไม่มีสิ่งกีดขวางเสาอากาศ
เขียนโปรแกรมสำหรับเซ็นเซอร์ GPS
ตอนนี้ Raspberry Pi สามารถเขียนโปรแกรมเพื่อใช้งานเซ็นเซอร์ GPS ที่เชื่อมต่อได้แล้ว
งาน - เขียนโปรแกรมสำหรับเซ็นเซอร์ GPS
เขียนโปรแกรมสำหรับอุปกรณ์
-
เปิด Raspberry Pi และรอให้บูตเสร็จ
-
เซ็นเซอร์ GPS มีไฟ LED 2 ดวง - ไฟ LED สีน้ำเงินที่กระพริบเมื่อมีการส่งข้อมูล และไฟ LED สีเขียวที่กระพริบทุกวินาทีเมื่อรับข้อมูลจากดาวเทียม ตรวจสอบให้แน่ใจว่าไฟ LED สีน้ำเงินกระพริบเมื่อเปิด Raspberry Pi หลังจากไม่กี่นาที ไฟ LED สีเขียวจะเริ่มกระพริบ - หากไม่กระพริบ คุณอาจต้องปรับตำแหน่งเสาอากาศ
-
เปิด VS Code ไม่ว่าจะโดยตรงบน Pi หรือเชื่อมต่อผ่าน Remote SSH extension
⚠️ คุณสามารถดูคำแนะนำในการตั้งค่าและเปิด VS Code ในบทเรียนที่ 1 ได้หากจำเป็น ที่นี่
-
สำหรับ Raspberry Pi รุ่นใหม่ที่รองรับ Bluetooth จะมีปัญหาความขัดแย้งระหว่างพอร์ต serial ที่ใช้สำหรับ Bluetooth และพอร์ตที่ใช้โดย Grove UART เพื่อแก้ไขปัญหานี้ ให้ทำตามขั้นตอนดังนี้:
-
จาก terminal ใน VS Code แก้ไขไฟล์
/boot/config.txtโดยใช้nanoซึ่งเป็นโปรแกรมแก้ไขข้อความใน terminal ด้วยคำสั่งต่อไปนี้:sudo nano /boot/config.txtไฟล์นี้ไม่สามารถแก้ไขได้โดยตรงใน VS Code เนื่องจากต้องใช้สิทธิ์
sudoซึ่งเป็นสิทธิ์ระดับสูง VS Code ไม่ทำงานด้วยสิทธิ์นี้ -
ใช้ปุ่มลูกศรเพื่อเลื่อนไปยังท้ายไฟล์ จากนั้นคัดลอกโค้ดด้านล่างและวางลงในท้ายไฟล์:
dtoverlay=pi3-miniuart-bt dtoverlay=pi3-disable-bt enable_uart=1คุณสามารถวางโค้ดโดยใช้คีย์ลัดปกติของอุปกรณ์ (
Ctrl+vบน Windows, Linux หรือ Raspberry Pi OS,Cmd+vบน macOS) -
บันทึกไฟล์นี้และออกจาก nano โดยกด
Ctrl+xกดyเมื่อถูกถามว่าต้องการบันทึกการเปลี่ยนแปลงหรือไม่ จากนั้นกดenterเพื่อยืนยันว่าต้องการเขียนทับไฟล์/boot/config.txtหากคุณทำผิดพลาด คุณสามารถออกโดยไม่บันทึก แล้วทำขั้นตอนนี้ใหม่อีกครั้ง
-
แก้ไขไฟล์
/boot/cmdline.txtใน nano ด้วยคำสั่งต่อไปนี้:sudo nano /boot/cmdline.txt -
ไฟล์นี้มีคู่คีย์/ค่าแยกด้วยช่องว่าง ลบคู่คีย์/ค่าที่มีคีย์
consoleออก ซึ่งอาจมีลักษณะดังนี้:console=serial0,115200 console=tty1คุณสามารถเลื่อนไปยังรายการเหล่านี้โดยใช้ปุ่มลูกศร จากนั้นลบโดยใช้ปุ่ม
delหรือbackspaceตามปกติตัวอย่างเช่น หากไฟล์ต้นฉบับมีลักษณะดังนี้:
console=serial0,115200 console=tty1 root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwaitเวอร์ชันใหม่จะเป็น:
root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait -
ทำตามขั้นตอนด้านบนเพื่อบันทึกไฟล์นี้และออกจาก nano
-
รีบูต Raspberry Pi จากนั้นเชื่อมต่อใหม่ใน VS Code หลังจาก Pi รีบูตเสร็จ
-
-
จาก terminal สร้างโฟลเดอร์ใหม่ในไดเรกทอรี home ของผู้ใช้
piชื่อgps-sensorสร้างไฟล์ในโฟลเดอร์นี้ชื่อapp.py -
เปิดโฟลเดอร์นี้ใน VS Code
-
โมดูล GPS ส่งข้อมูล UART ผ่านพอร์ต serial ติดตั้งแพ็กเกจ Pip
pyserialเพื่อสื่อสารกับพอร์ต serial จากโค้ด Python ของคุณ:pip3 install pyserial -
เพิ่มโค้ดต่อไปนี้ลงในไฟล์
app.pyของคุณ:import time import serial serial = serial.Serial('/dev/ttyAMA0', 9600, timeout=1) serial.reset_input_buffer() serial.flush() def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)โค้ดนี้นำเข้าโมดูล
serialจากแพ็กเกจ Pippyserialจากนั้นเชื่อมต่อกับพอร์ต serial/dev/ttyAMA0- ซึ่งเป็นที่อยู่ของพอร์ต serial ที่ Grove Pi Base Hat ใช้สำหรับพอร์ต UART จากนั้นล้างข้อมูลที่มีอยู่ในการเชื่อมต่อ serial นี้ต่อมา ฟังก์ชันชื่อ
print_gps_dataถูกกำหนดขึ้นเพื่อพิมพ์บรรทัดที่ส่งเข้ามาไปยังคอนโซลจากนั้นโค้ดจะวนลูปตลอดไป โดยอ่านบรรทัดข้อความจากพอร์ต serial ในแต่ละลูป และเรียกใช้ฟังก์ชัน
print_gps_dataสำหรับแต่ละบรรทัดหลังจากอ่านข้อมูลทั้งหมดแล้ว ลูปจะหยุดพักเป็นเวลา 1 วินาที จากนั้นลองอีกครั้ง
-
รันโค้ดนี้ คุณจะเห็นผลลัพธ์ดิบจากเซ็นเซอร์ GPS ซึ่งอาจมีลักษณะดังนี้:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68หากคุณได้รับข้อผิดพลาดต่อไปนี้เมื่อหยุดและเริ่มโค้ดใหม่ ให้เพิ่มบล็อก
try - exceptลงในลูป while ของคุณUnicodeDecodeError: 'utf-8' codec can't decode byte 0x93 in position 0: invalid start byte UnicodeDecodeError: 'utf-8' codec can't decode byte 0xf1 in position 0: invalid continuation bytewhile True: try: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data() line = serial.readline().decode('utf-8') # There's a random chance the first byte being read is part way through a character. # Read another full line and continue. except UnicodeDecodeError: line = serial.readline().decode('utf-8') time.sleep(1)
💁 คุณสามารถค้นหาโค้ดนี้ได้ในโฟลเดอร์ code-gps/pi
😀 โปรแกรมเซ็นเซอร์ GPS ของคุณสำเร็จแล้ว!
ข้อจำกัดความรับผิดชอบ:
เอกสารนี้ได้รับการแปลโดยใช้บริการแปลภาษา AI Co-op Translator แม้ว่าเราจะพยายามให้การแปลมีความถูกต้อง แต่โปรดทราบว่าการแปลโดยอัตโนมัติอาจมีข้อผิดพลาดหรือความไม่ถูกต้อง เอกสารต้นฉบับในภาษาที่เป็นต้นฉบับควรถือว่าเป็นแหล่งข้อมูลที่เชื่อถือได้ สำหรับข้อมูลที่สำคัญ ขอแนะนำให้ใช้บริการแปลภาษามืออาชีพ เราไม่รับผิดชอบต่อความเข้าใจผิดหรือการตีความผิดที่เกิดจากการใช้การแปลนี้