7.4 KiB
Läs GPS-data - Virtuell IoT-hårdvara
I den här delen av lektionen kommer du att lägga till en GPS-sensor till din virtuella IoT-enhet och läsa värden från den.
Virtuell hårdvara
Den virtuella IoT-enheten kommer att använda en simulerad GPS-sensor som är tillgänglig via UART genom en seriell port.
En fysisk GPS-sensor har en antenn för att ta emot radiovågor från GPS-satelliter och omvandla GPS-signaler till GPS-data. Den virtuella versionen simulerar detta genom att låta dig antingen ställa in en latitud och longitud, skicka råa NMEA-meningar eller ladda upp en GPX-fil med flera platser som kan returneras sekventiellt.
🎓 NMEA-meningar kommer att behandlas senare i denna lektion
Lägg till sensorn i CounterFit
För att använda en virtuell GPS-sensor behöver du lägga till en i CounterFit-appen.
Uppgift - lägg till sensorn i CounterFit
Lägg till GPS-sensorn i CounterFit-appen.
-
Skapa en ny Python-app på din dator i en mapp som heter
gps-sensormed en enda fil som heterapp.pyoch en virtuell Python-miljö, och lägg till CounterFit pip-paketen.⚠️ Du kan hänvisa till instruktionerna för att skapa och ställa in ett CounterFit Python-projekt i lektion 1 om det behövs.
-
Installera ett ytterligare Pip-paket för att installera en CounterFit-shim som kan kommunicera med UART-baserade sensorer via en seriell anslutning. Se till att du installerar detta från en terminal med den virtuella miljön aktiverad.
pip install counterfit-shims-serial -
Se till att CounterFit-webbappen körs.
-
Skapa en GPS-sensor:
-
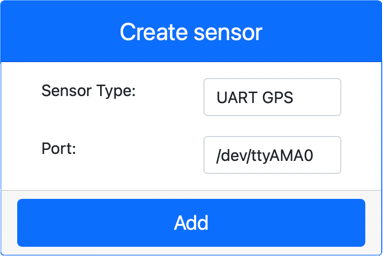
I rutan Create sensor i panelen Sensors, öppna rullgardinsmenyn Sensor type och välj UART GPS.
-
Lämna Port inställd på /dev/ttyAMA0.
-
Välj knappen Add för att skapa GPS-sensorn på porten
/dev/ttyAMA0.
GPS-sensorn kommer att skapas och visas i sensorlistan.
-
Programmera GPS-sensorn
Den virtuella IoT-enheten kan nu programmeras för att använda den virtuella GPS-sensorn.
Uppgift - programmera GPS-sensorn
Programmera GPS-sensorappen.
-
Se till att appen
gps-sensorär öppen i VS Code. -
Öppna filen
app.py. -
Lägg till följande kod högst upp i
app.pyför att ansluta appen till CounterFit:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Lägg till följande kod under detta för att importera några nödvändiga bibliotek, inklusive biblioteket för CounterFit-serieporten:
import time import counterfit_shims_serial serial = counterfit_shims_serial.Serial('/dev/ttyAMA0')Denna kod importerar modulen
serialfrån Pip-paketetcounterfit_shims_serial. Den ansluter sedan till seriella porten/dev/ttyAMA0- detta är adressen till den seriella port som den virtuella GPS-sensorn använder för sin UART-port. -
Lägg till följande kod under detta för att läsa från den seriella porten och skriva ut värdena till konsolen:
def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)En funktion som heter
print_gps_datadefinieras, som skriver ut raden som skickas till den till konsolen.Därefter loopar koden för alltid och läser så många rader text som möjligt från den seriella porten i varje loop. Den anropar funktionen
print_gps_dataför varje rad.När all data har lästs, sover loopen i 1 sekund och försöker sedan igen.
-
Kör denna kod och se till att du använder en annan terminal än den där CounterFit-appen körs, så att CounterFit-appen förblir igång.
-
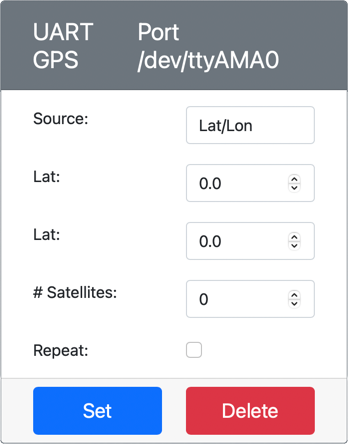
Ändra värdet på GPS-sensorn från CounterFit-appen. Du kan göra detta på ett av följande sätt:
-
Ställ in Source till
Lat/Lonoch ange en specifik latitud, longitud och antal satelliter som används för att få GPS-fix. Detta värde skickas endast en gång, så markera rutan Repeat för att få data att upprepas varje sekund.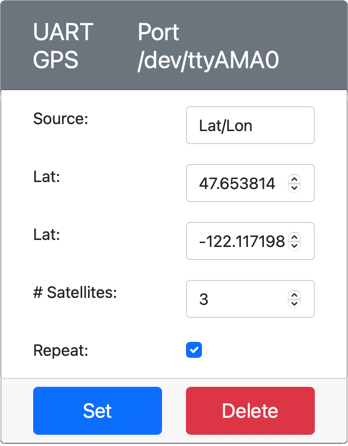
-
Ställ in Source till
NMEAoch lägg till några NMEA-meningar i textrutan. Alla dessa värden kommer att skickas, med en fördröjning på 1 sekund innan varje ny GGA (positionsfixerings-)mening kan läsas.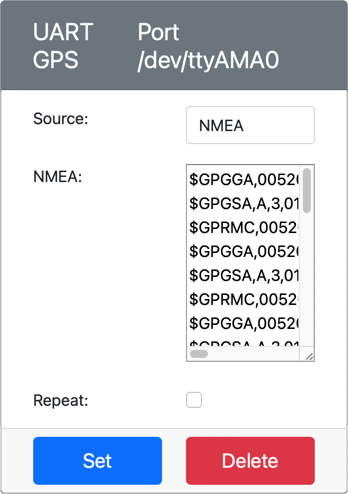
Du kan använda ett verktyg som nmeagen.org för att generera dessa meningar genom att rita på en karta. Dessa värden skickas endast en gång, så markera rutan Repeat för att få data att upprepas en sekund efter att allt har skickats.
-
Ställ in Source till GPX-fil och ladda upp en GPX-fil med spårplatser. Du kan ladda ner GPX-filer från ett antal populära kart- och vandringssajter, som AllTrails. Dessa filer innehåller flera GPS-platser som en rutt, och GPS-sensorn kommer att returnera varje ny plats med 1 sekunds intervall.
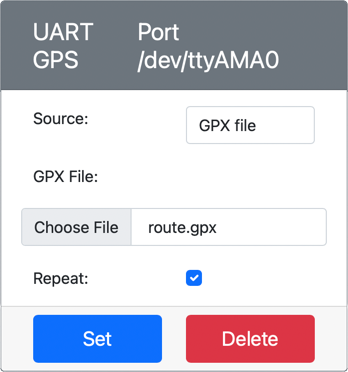
Dessa värden skickas endast en gång, så markera rutan Repeat för att få data att upprepas en sekund efter att allt har skickats.
När du har konfigurerat GPS-inställningarna, välj knappen Set för att tillämpa dessa värden på sensorn.
-
-
Du kommer att se råutdata från GPS-sensorn, något i stil med följande:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
💁 Du kan hitta denna kod i mappen code-gps/virtual-device.
😀 Din GPS-sensorprogrammering lyckades!
Ansvarsfriskrivning:
Detta dokument har översatts med hjälp av AI-översättningstjänsten Co-op Translator. Även om vi strävar efter noggrannhet, bör det noteras att automatiska översättningar kan innehålla fel eller felaktigheter. Det ursprungliga dokumentet på dess originalspråk bör betraktas som den auktoritativa källan. För kritisk information rekommenderas professionell mänsklig översättning. Vi ansvarar inte för eventuella missförstånd eller feltolkningar som uppstår vid användning av denna översättning.