27 KiB
Захват изображения - Wio Terminal
В этой части урока вы добавите камеру к вашему Wio Terminal и будете захватывать изображения с её помощью.
Аппаратное обеспечение
Для Wio Terminal требуется камера.
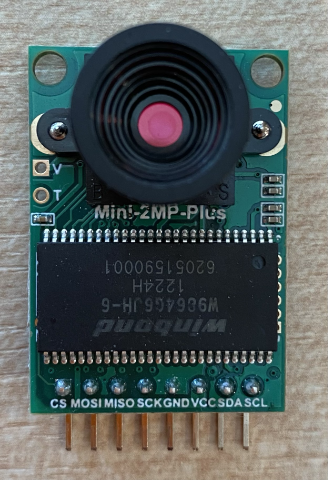
Камера, которую вы будете использовать, — это ArduCam Mini 2MP Plus. Это 2-мегапиксельная камера на основе сенсора OV2640. Она передает изображения через интерфейс SPI и использует I2C для настройки сенсора.
Подключение камеры
ArduCam не имеет разъема Grove, вместо этого она подключается к шинам SPI и I2C через GPIO-пины на Wio Terminal.
Задание - подключите камеру
Подключите камеру.
-
Пины на основании ArduCam нужно подключить к GPIO-пинам на Wio Terminal. Чтобы было проще найти нужные пины, прикрепите наклейку с обозначением GPIO-пинов, которая идет в комплекте с Wio Terminal:

-
Используя соединительные провода, выполните следующие подключения:
Пин ArduCAM Пин Wio Terminal Описание CS 24 (SPI_CS) Выбор чипа SPI MOSI 19 (SPI_MOSI) Выход SPI-контроллера, вход периферии MISO 21 (SPI_MISO) Вход SPI-контроллера, выход периферии SCK 23 (SPI_SCLK) Последовательный тактовый сигнал SPI GND 6 (GND) Земля - 0 В VCC 4 (5V) Питание 5 В SDA 3 (I2C1_SDA) Последовательные данные I2C SCL 5 (I2C1_SCL) Последовательный тактовый сигнал I2C 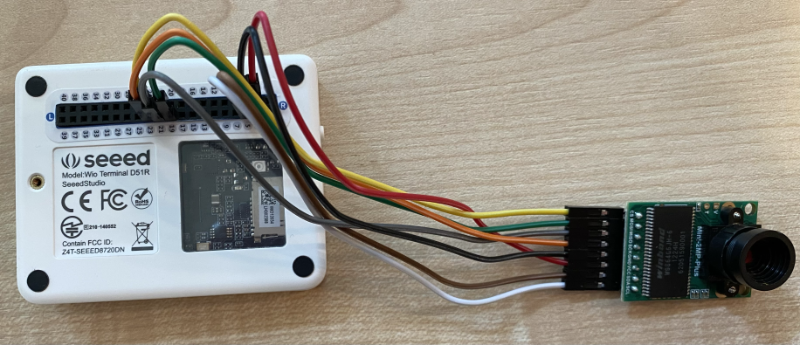
Соединения GND и VCC обеспечивают питание 5 В для ArduCam. Камера работает на 5 В, в отличие от датчиков Grove, которые работают на 3 В. Это питание поступает напрямую от USB-C подключения, которое питает устройство.
💁 Для подключения SPI обозначения пинов на ArduCam и названия пинов Wio Terminal, используемые в коде, все еще используют старую нотацию. В этом уроке будет использоваться новая нотация, за исключением случаев, когда названия пинов используются в коде.
-
Теперь вы можете подключить Wio Terminal к вашему компьютеру.
Программирование устройства для подключения к камере
Теперь Wio Terminal можно запрограммировать для работы с подключенной камерой ArduCAM.
Задание - запрограммируйте устройство для подключения к камере
-
Создайте новый проект для Wio Terminal с использованием PlatformIO. Назовите проект
fruit-quality-detector. Добавьте код в функциюsetupдля настройки последовательного порта. -
Добавьте код для подключения к Wi-Fi, указав ваши учетные данные Wi-Fi в файле
config.h. Не забудьте добавить необходимые библиотеки в файлplatformio.ini. -
Библиотека ArduCam недоступна как библиотека Arduino, которую можно установить через файл
platformio.ini. Вместо этого её нужно установить из исходного кода с их страницы на GitHub. Вы можете сделать это, либо:- Клонировав репозиторий с https://github.com/ArduCAM/Arduino.git
- Перейдя на репозиторий на GitHub по адресу github.com/ArduCAM/Arduino и скачав код в виде zip-архива через кнопку Code
-
Вам нужна только папка
ArduCAMиз этого кода. Скопируйте всю папку в папкуlibвашего проекта.⚠️ Важно скопировать всю папку, чтобы код находился в
lib/ArduCam. Не копируйте только содержимое папкиArduCamв папкуlib, скопируйте всю папку целиком. -
Код библиотеки ArduCam работает с несколькими типами камер. Тип камеры, который вы хотите использовать, настраивается с помощью флагов компилятора — это позволяет уменьшить размер библиотеки, исключив код для камер, которые вы не используете. Чтобы настроить библиотеку для камеры OV2640, добавьте следующее в конец файла
platformio.ini:build_flags = -DARDUCAM_SHIELD_V2 -DOV2640_CAMЭто задает два флага компилятора:
ARDUCAM_SHIELD_V2— указывает библиотеке, что камера подключена к плате Arduino, известной как shield.OV2640_CAM— указывает библиотеке включить только код для камеры OV2640.
-
Добавьте заголовочный файл в папку
srcс именемcamera.h. Этот файл будет содержать код для взаимодействия с камерой. Добавьте в этот файл следующий код:#pragma once #include <ArduCAM.h> #include <Wire.h> class Camera { public: Camera(int format, int image_size) : _arducam(OV2640, PIN_SPI_SS) { _format = format; _image_size = image_size; } bool init() { // Reset the CPLD _arducam.write_reg(0x07, 0x80); delay(100); _arducam.write_reg(0x07, 0x00); delay(100); // Check if the ArduCAM SPI bus is OK _arducam.write_reg(ARDUCHIP_TEST1, 0x55); if (_arducam.read_reg(ARDUCHIP_TEST1) != 0x55) { return false; } // Change MCU mode _arducam.set_mode(MCU2LCD_MODE); uint8_t vid, pid; // Check if the camera module type is OV2640 _arducam.wrSensorReg8_8(0xff, 0x01); _arducam.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid); _arducam.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid); if ((vid != 0x26) && ((pid != 0x41) || (pid != 0x42))) { return false; } _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); _arducam.OV2640_set_Light_Mode(Auto); _arducam.OV2640_set_Special_effects(Normal); delay(1000); return true; } void startCapture() { _arducam.flush_fifo(); _arducam.clear_fifo_flag(); _arducam.start_capture(); } bool captureReady() { return _arducam.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK); } bool readImageToBuffer(byte **buffer, uint32_t &buffer_length) { if (!captureReady()) return false; // Get the image file length uint32_t length = _arducam.read_fifo_length(); buffer_length = length; if (length >= MAX_FIFO_SIZE) { return false; } if (length == 0) { return false; } // create the buffer byte *buf = new byte[length]; uint8_t temp = 0, temp_last = 0; int i = 0; uint32_t buffer_pos = 0; bool is_header = false; _arducam.CS_LOW(); _arducam.set_fifo_burst(); while (length--) { temp_last = temp; temp = SPI.transfer(0x00); //Read JPEG data from FIFO if ((temp == 0xD9) && (temp_last == 0xFF)) //If find the end ,break while, { buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_HIGH(); } if (is_header == true) { //Write image data to buffer if not full if (i < 256) { buf[buffer_pos] = temp; buffer_pos++; i++; } else { _arducam.CS_HIGH(); i = 0; buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_LOW(); _arducam.set_fifo_burst(); } } else if ((temp == 0xD8) & (temp_last == 0xFF)) { is_header = true; buf[buffer_pos] = temp_last; buffer_pos++; i++; buf[buffer_pos] = temp; buffer_pos++; i++; } } _arducam.clear_fifo_flag(); _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); // return the buffer *buffer = buf; } private: ArduCAM _arducam; int _format; int _image_size; };Это низкоуровневый код, который настраивает камеру с использованием библиотек ArduCam и извлекает изображения по мере необходимости через шину SPI. Этот код специфичен для ArduCam, поэтому вам не нужно беспокоиться о том, как он работает на данном этапе.
-
В
main.cppдобавьте следующий код под другими инструкциямиinclude, чтобы включить этот новый файл и создать экземпляр класса камеры:#include "camera.h" Camera camera = Camera(JPEG, OV2640_640x480);Это создает объект
Camera, который сохраняет изображения в формате JPEG с разрешением 640x480. Хотя поддерживаются более высокие разрешения (до 3280x2464), классификатор изображений работает с гораздо меньшими изображениями (227x227), поэтому нет необходимости захватывать и отправлять изображения большего размера. -
Добавьте следующий код ниже, чтобы определить функцию настройки камеры:
void setupCamera() { pinMode(PIN_SPI_SS, OUTPUT); digitalWrite(PIN_SPI_SS, HIGH); Wire.begin(); SPI.begin(); if (!camera.init()) { Serial.println("Error setting up the camera!"); } }Функция
setupCameraначинает с настройки пина выбора чипа SPI (PIN_SPI_SS) как высокого, делая Wio Terminal контроллером SPI. Затем она запускает шины I2C и SPI. Наконец, она инициализирует класс камеры, который настраивает параметры сенсора камеры и проверяет правильность подключения. -
Вызовите эту функцию в конце функции
setup:setupCamera(); -
Соберите и загрузите этот код, а затем проверьте вывод в последовательном мониторе. Если вы видите сообщение
Error setting up the camera!, проверьте проводку, чтобы убедиться, что все кабели подключены к правильным пинам на ArduCam и GPIO-пинам на Wio Terminal, а также что все соединительные провода надежно закреплены.
Захват изображения
Теперь Wio Terminal можно запрограммировать для захвата изображения при нажатии кнопки.
Задание - захватите изображение
-
Микроконтроллеры выполняют ваш код непрерывно, поэтому сложно инициировать такие действия, как съемка фото, без реакции на датчик. У Wio Terminal есть кнопки, поэтому камеру можно настроить на срабатывание при нажатии одной из кнопок. Добавьте следующий код в конец функции
setup, чтобы настроить кнопку C (одну из трех кнопок сверху, ближайшую к выключателю питания).
pinMode(WIO_KEY_C, INPUT_PULLUP);Режим
INPUT_PULLUPпо сути инвертирует вход. Например, обычно кнопка отправляет низкий сигнал, когда не нажата, и высокий сигнал, когда нажата. При установке в режимINPUT_PULLUPона отправляет высокий сигнал, когда не нажата, и низкий сигнал, когда нажата. -
Добавьте пустую функцию для реакции на нажатие кнопки перед функцией
loop:void buttonPressed() { } -
Вызовите эту функцию в методе
loop, когда кнопка нажата:void loop() { if (digitalRead(WIO_KEY_C) == LOW) { buttonPressed(); delay(2000); } delay(200); }Этот код проверяет, нажата ли кнопка. Если она нажата, вызывается функция
buttonPressed, и цикл задерживается на 2 секунды. Это позволяет кнопке быть отпущенной, чтобы длительное нажатие не регистрировалось дважды.💁 Кнопка на Wio Terminal настроена как
INPUT_PULLUP, поэтому она отправляет высокий сигнал, когда не нажата, и низкий сигнал, когда нажата. -
Добавьте следующий код в функцию
buttonPressed:camera.startCapture(); while (!camera.captureReady()) delay(100); Serial.println("Image captured"); byte *buffer; uint32_t length; if (camera.readImageToBuffer(&buffer, length)) { Serial.print("Image read to buffer with length "); Serial.println(length); delete(buffer); }Этот код начинает захват изображения, вызывая
startCapture. Аппаратное обеспечение камеры не возвращает данные сразу, когда вы их запрашиваете. Вместо этого вы отправляете команду на начало захвата, и камера работает в фоновом режиме, чтобы захватить изображение, преобразовать его в JPEG и сохранить в локальном буфере на самой камере. ВызовcaptureReadyзатем проверяет, завершен ли захват изображения.После завершения захвата данные изображения копируются из буфера камеры в локальный буфер (массив байтов) с помощью вызова
readImageToBuffer. Длина буфера затем отправляется в последовательный монитор. -
Соберите и загрузите этот код, а затем проверьте вывод в последовательном мониторе. Каждый раз, когда вы нажимаете кнопку C, изображение будет захвачено, и вы увидите размер изображения, отправленный в последовательный монитор.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 9224 Image captured Image read to buffer with length 11272Размеры разных изображений будут различаться. Они сжаты в формате JPEG, и размер файла JPEG для заданного разрешения зависит от содержимого изображения.
💁 Вы можете найти этот код в папке code-camera/wio-terminal.
😀 Вы успешно захватили изображения с помощью вашего Wio Terminal.
Дополнительно - проверьте изображения камеры с помощью SD-карты
Самый простой способ увидеть изображения, захваченные камерой, — записать их на SD-карту в Wio Terminal, а затем просмотреть их на вашем компьютере. Выполните этот шаг, если у вас есть свободная microSD-карта и разъем для microSD-карт на вашем компьютере или адаптер.
Wio Terminal поддерживает только microSD-карты объемом до 16 ГБ. Если у вас карта большего объема, она не будет работать.
Задание - проверьте изображения камеры с помощью SD-карты
-
Отформатируйте microSD-карту в формате FAT32 или exFAT, используя соответствующие приложения на вашем компьютере (Disk Utility на macOS, Проводник на Windows или командные инструменты в Linux).
-
Вставьте microSD-карту в разъем чуть ниже выключателя питания. Убедитесь, что она вставлена до конца, пока не щелкнет и не останется на месте. Возможно, вам потребуется надавить на неё ногтем или тонким инструментом.
-
Добавьте следующие инструкции
includeв начало файлаmain.cpp:#include "SD/Seeed_SD.h" #include <Seeed_FS.h> -
Добавьте следующую функцию перед функцией
setup:void setupSDCard() { while (!SD.begin(SDCARD_SS_PIN, SDCARD_SPI)) { Serial.println("SD Card Error"); } }Эта функция настраивает SD-карту с использованием шины SPI.
-
Вызовите её из функции
setup:setupSDCard(); -
Добавьте следующий код выше функции
buttonPressed:int fileNum = 1; void saveToSDCard(byte *buffer, uint32_t length) { char buff[16]; sprintf(buff, "%d.jpg", fileNum); fileNum++; File outFile = SD.open(buff, FILE_WRITE ); outFile.write(buffer, length); outFile.close(); Serial.print("Image written to file "); Serial.println(buff); }Это определяет глобальную переменную для подсчета файлов. Она используется для имен файлов изображений, чтобы можно было захватывать несколько изображений с увеличивающимися именами файлов —
1.jpg,2.jpgи так далее.Затем определяется функция
saveToSDCard, которая принимает буфер данных в байтах и длину буфера. Создается имя файла с использованием счетчика файлов, и счетчик увеличивается для следующего файла. Двоичные данные из буфера затем записываются в файл. -
Вызовите функцию
saveToSDCardиз функцииbuttonPressed. Вызов должен быть до удаления буфера:Serial.print("Image read to buffer with length "); Serial.println(length); saveToSDCard(buffer, length); delete(buffer); -
Соберите и загрузите этот код, а затем проверьте вывод в последовательном мониторе. Каждый раз, когда вы нажимаете кнопку C, изображение будет захвачено и сохранено на SD-карту.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 16392 Image written to file 1.jpg Image captured Image read to buffer with length 14344 Image written to file 2.jpg -
Выключите питание, а затем извлеките microSD-карту, слегка нажав на неё и отпустив, чтобы она выскочила. Возможно, вам потребуется использовать тонкий инструмент для этого. Подключите microSD-карту к вашему компьютеру, чтобы просмотреть изображения.
 💁 Может потребоваться несколько изображений, чтобы баланс белого камеры настроился. Вы заметите это по цвету захваченных изображений, первые несколько могут выглядеть с искажением цвета. Вы всегда можете обойти это, изменив код для захвата нескольких изображений, которые игнорируются в функции
💁 Может потребоваться несколько изображений, чтобы баланс белого камеры настроился. Вы заметите это по цвету захваченных изображений, первые несколько могут выглядеть с искажением цвета. Вы всегда можете обойти это, изменив код для захвата нескольких изображений, которые игнорируются в функции setup.
Отказ от ответственности:
Этот документ был переведен с помощью сервиса автоматического перевода Co-op Translator. Хотя мы стремимся к точности, пожалуйста, учитывайте, что автоматические переводы могут содержать ошибки или неточности. Оригинальный документ на его родном языке следует считать авторитетным источником. Для получения критически важной информации рекомендуется профессиональный перевод человеком. Мы не несем ответственности за любые недоразумения или неправильные интерпретации, возникающие в результате использования данного перевода.