7.6 KiB
Ler dados de GPS - Hardware Virtual IoT
Nesta parte da lição, irá adicionar um sensor GPS ao seu dispositivo IoT virtual e ler os valores dele.
Hardware Virtual
O dispositivo IoT virtual usará um sensor GPS simulado que é acessível via UART através de uma porta serial.
Um sensor GPS físico terá uma antena para captar ondas de rádio dos satélites GPS e converter os sinais GPS em dados GPS. A versão virtual simula isso, permitindo que defina uma latitude e longitude, envie frases NMEA brutas ou carregue um ficheiro GPX com várias localizações que podem ser retornadas sequencialmente.
🎓 As frases NMEA serão abordadas mais tarde nesta lição.
Adicionar o sensor ao CounterFit
Para usar um sensor GPS virtual, precisa de adicionar um à aplicação CounterFit.
Tarefa - adicionar o sensor ao CounterFit
Adicione o sensor GPS à aplicação CounterFit.
-
Crie uma nova aplicação Python no seu computador numa pasta chamada
gps-sensorcom um único ficheiro chamadoapp.pye um ambiente virtual Python, e adicione os pacotes pip do CounterFit.⚠️ Pode consultar as instruções para criar e configurar um projeto Python do CounterFit na lição 1, se necessário.
-
Instale um pacote Pip adicional para instalar um shim do CounterFit que pode comunicar com sensores baseados em UART através de uma ligação serial. Certifique-se de que está a instalar isto a partir de um terminal com o ambiente virtual ativado.
pip install counterfit-shims-serial -
Certifique-se de que a aplicação web do CounterFit está em execução.
-
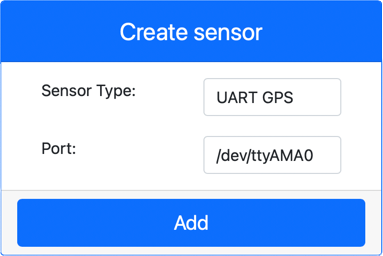
Crie um sensor GPS:
-
Na caixa Create sensor no painel Sensors, abra o menu suspenso Sensor type e selecione UART GPS.
-
Deixe a Port definida como /dev/ttyAMA0.
-
Selecione o botão Add para criar o sensor GPS na porta
/dev/ttyAMA0.
O sensor GPS será criado e aparecerá na lista de sensores.
-
Programar o sensor GPS
O dispositivo IoT virtual pode agora ser programado para usar o sensor GPS virtual.
Tarefa - programar o sensor GPS
Programe a aplicação do sensor GPS.
-
Certifique-se de que a aplicação
gps-sensorestá aberta no VS Code. -
Abra o ficheiro
app.py. -
Adicione o seguinte código no início do
app.pypara ligar a aplicação ao CounterFit:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Adicione o seguinte código abaixo deste para importar algumas bibliotecas necessárias, incluindo a biblioteca para a porta serial do CounterFit:
import time import counterfit_shims_serial serial = counterfit_shims_serial.Serial('/dev/ttyAMA0')Este código importa o módulo
serialdo pacote Pipcounterfit_shims_serial. Em seguida, liga-se à porta serial/dev/ttyAMA0- este é o endereço da porta serial que o sensor GPS virtual usa para a sua porta UART. -
Adicione o seguinte código abaixo deste para ler da porta serial e imprimir os valores no terminal:
def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)É definida uma função chamada
print_gps_dataque imprime no terminal a linha passada para ela.Em seguida, o código entra num loop infinito, lendo o máximo de linhas de texto possível da porta serial em cada iteração. Chama a função
print_gps_datapara cada linha.Depois de todos os dados serem lidos, o loop faz uma pausa de 1 segundo e tenta novamente.
-
Execute este código, garantindo que está a usar um terminal diferente daquele em que a aplicação CounterFit está a ser executada, para que a aplicação CounterFit continue em funcionamento.
-
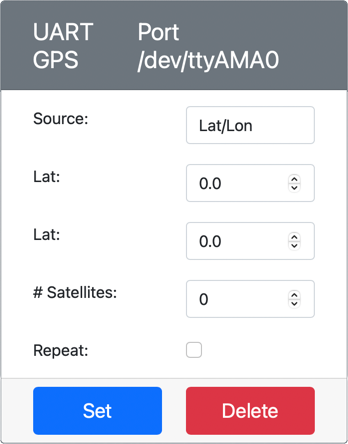
Na aplicação CounterFit, altere o valor do sensor GPS. Pode fazer isso de uma das seguintes formas:
-
Defina a Source como
Lat/Lone configure uma latitude, longitude e número de satélites usados para obter a fixação GPS. Este valor será enviado apenas uma vez, por isso marque a caixa Repeat para que os dados sejam repetidos a cada segundo.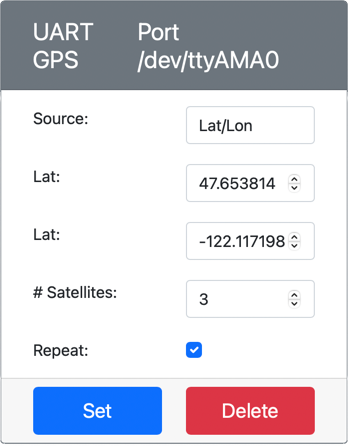
-
Defina a Source como
NMEAe adicione algumas frases NMEA na caixa de texto. Todos estes valores serão enviados, com um atraso de 1 segundo antes de cada nova frase GGA (fixação de posição) poder ser lida.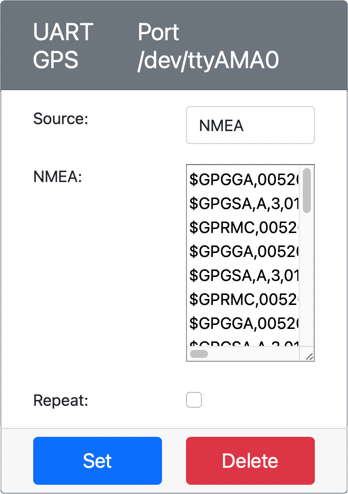
Pode usar uma ferramenta como nmeagen.org para gerar estas frases desenhando num mapa. Estes valores serão enviados apenas uma vez, por isso marque a caixa Repeat para que os dados sejam repetidos um segundo após todos terem sido enviados.
-
Defina a Source como ficheiro GPX e carregue um ficheiro GPX com localizações de trilhos. Pode descarregar ficheiros GPX de vários sites populares de mapas e caminhadas, como AllTrails. Estes ficheiros contêm várias localizações GPS como um trilho, e o sensor GPS retornará cada nova localização em intervalos de 1 segundo.
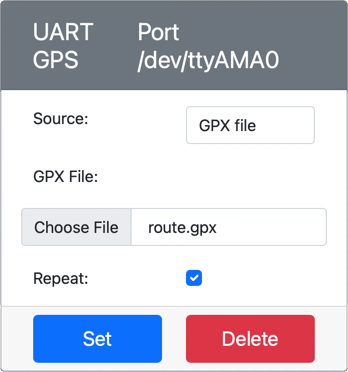
Estes valores serão enviados apenas uma vez, por isso marque a caixa Repeat para que os dados sejam repetidos um segundo após todos terem sido enviados.
Depois de configurar as definições do GPS, selecione o botão Set para confirmar estes valores no sensor.
-
-
Verá a saída bruta do sensor GPS, algo como o seguinte:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
💁 Pode encontrar este código na pasta code-gps/virtual-device.
😀 O seu programa do sensor GPS foi um sucesso!
Aviso Legal:
Este documento foi traduzido utilizando o serviço de tradução por IA Co-op Translator. Embora nos esforcemos para garantir a precisão, esteja ciente de que traduções automáticas podem conter erros ou imprecisões. O documento original na sua língua nativa deve ser considerado a fonte autoritária. Para informações críticas, recomenda-se a tradução profissional realizada por humanos. Não nos responsabilizamos por quaisquer mal-entendidos ou interpretações incorretas decorrentes do uso desta tradução.