8.3 KiB
Ler dados de GPS - Raspberry Pi
Nesta parte da lição, vais adicionar um sensor GPS ao teu Raspberry Pi e ler os valores obtidos.
Hardware
O Raspberry Pi necessita de um sensor GPS.
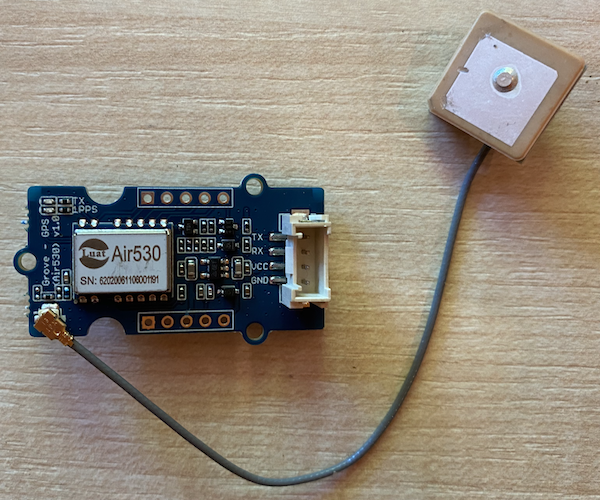
O sensor que vais utilizar é o sensor Grove GPS Air530. Este sensor pode conectar-se a múltiplos sistemas GPS para obter uma localização rápida e precisa. O sensor é composto por 2 partes - a eletrónica principal do sensor e uma antena externa conectada por um fio fino para captar as ondas de rádio dos satélites.
Este é um sensor UART, o que significa que envia dados GPS através de UART.
Conectar o sensor GPS
O sensor Grove GPS pode ser conectado ao Raspberry Pi.
Tarefa - conectar o sensor GPS
Conecta o sensor GPS.
-
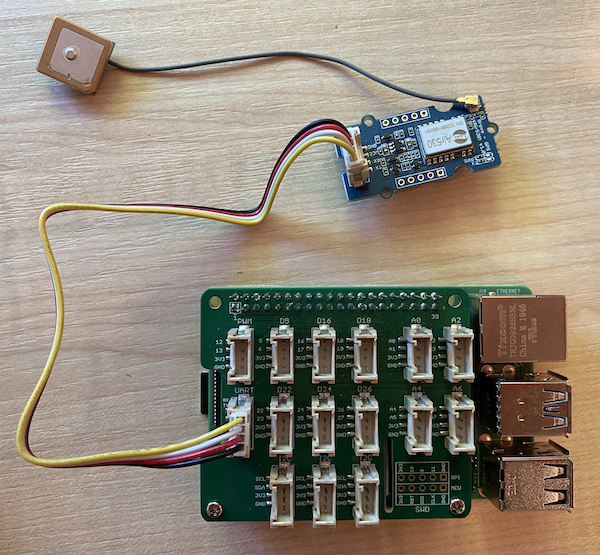
Insere uma extremidade de um cabo Grove na entrada do sensor GPS. O cabo só encaixa de uma forma.
-
Com o Raspberry Pi desligado, conecta a outra extremidade do cabo Grove à entrada UART marcada como UART no Grove Base Hat ligado ao Pi. Esta entrada está na fila do meio, no lado mais próximo da ranhura do cartão SD, oposto às portas USB e à entrada Ethernet.
-
Posiciona o sensor GPS de forma que a antena conectada tenha visibilidade para o céu - idealmente junto a uma janela aberta ou no exterior. É mais fácil obter um sinal claro sem obstruções à antena.
Programar o sensor GPS
Agora podes programar o Raspberry Pi para utilizar o sensor GPS conectado.
Tarefa - programar o sensor GPS
Programa o dispositivo.
-
Liga o Pi e espera que ele inicie.
-
O sensor GPS tem 2 LEDs - um LED azul que pisca quando os dados são transmitidos e um LED verde que pisca a cada segundo ao receber dados dos satélites. Certifica-te de que o LED azul está a piscar quando ligas o Pi. Após alguns minutos, o LED verde começará a piscar - se não, pode ser necessário reposicionar a antena.
-
Abre o VS Code, diretamente no Pi ou conectando-te através da extensão Remote SSH.
⚠️ Podes consultar as instruções para configurar e abrir o VS Code na lição 1, se necessário.
-
Com versões mais recentes do Raspberry Pi que suportam Bluetooth, existe um conflito entre a porta serial usada para Bluetooth e a usada pela porta UART do Grove. Para resolver isto, faz o seguinte:
-
No terminal do VS Code, edita o ficheiro
/boot/config.txtusando onano, um editor de texto integrado no terminal, com o seguinte comando:sudo nano /boot/config.txtEste ficheiro não pode ser editado diretamente no VS Code, pois precisas de permissões elevadas (
sudo). O VS Code não executa estas permissões. -
Usa as teclas de seta para navegar até ao final do ficheiro. Copia o código abaixo e cola-o no final do ficheiro:
dtoverlay=pi3-miniuart-bt dtoverlay=pi3-disable-bt enable_uart=1Podes colar utilizando os atalhos normais do teu dispositivo (
Ctrl+vno Windows, Linux ou Raspberry Pi OS,Cmd+vno macOS). -
Guarda o ficheiro e sai do
nanopressionandoCtrl+x. Pressionayquando te for perguntado se queres guardar as alterações e, em seguida,enterpara confirmar que queres sobrescrever o ficheiro/boot/config.txt.Se cometeres um erro, podes sair sem guardar e repetir os passos.
-
Edita o ficheiro
/boot/cmdline.txtnonanocom o seguinte comando:sudo nano /boot/cmdline.txt -
Este ficheiro contém vários pares de chave/valor separados por espaços. Remove quaisquer pares de chave/valor com a chave
console. Provavelmente terão este aspeto:console=serial0,115200 console=tty1Podes navegar até estas entradas usando as teclas de seta e apagá-las com as teclas
deloubackspace.Por exemplo, se o teu ficheiro original for assim:
console=serial0,115200 console=tty1 root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwaitA nova versão será:
root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait -
Segue os passos acima para guardar este ficheiro e sair do
nano. -
Reinicia o teu Pi e volta a conectar-te no VS Code após o reinício.
-
-
No terminal, cria uma nova pasta no diretório home do utilizador
pichamadagps-sensor. Cria um ficheiro nesta pasta chamadoapp.py. -
Abre esta pasta no VS Code.
-
O módulo GPS envia dados UART através de uma porta serial. Instala o pacote
pyserialdo Pip para comunicar com a porta serial no teu código Python:pip3 install pyserial -
Adiciona o seguinte código ao teu ficheiro
app.py:import time import serial serial = serial.Serial('/dev/ttyAMA0', 9600, timeout=1) serial.reset_input_buffer() serial.flush() def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)Este código importa o módulo
serialdo pacotepyserial. Em seguida, conecta-se à porta serial/dev/ttyAMA0- este é o endereço da porta serial que o Grove Pi Base Hat utiliza para a sua porta UART. Depois, limpa quaisquer dados existentes desta conexão serial.A seguir, é definida uma função chamada
print_gps_dataque imprime no terminal a linha passada para ela.O código entra então num loop infinito, lendo o máximo de linhas de texto possível da porta serial em cada iteração. Chama a função
print_gps_datapara cada linha.Após ler todos os dados, o loop faz uma pausa de 1 segundo e tenta novamente.
-
Executa este código. Verás a saída bruta do sensor GPS, algo como o seguinte:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68Se obtiveres um dos seguintes erros ao parar e reiniciar o código, adiciona um bloco
try - exceptao teu loopwhile.UnicodeDecodeError: 'utf-8' codec can't decode byte 0x93 in position 0: invalid start byte UnicodeDecodeError: 'utf-8' codec can't decode byte 0xf1 in position 0: invalid continuation bytewhile True: try: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data() line = serial.readline().decode('utf-8') # There's a random chance the first byte being read is part way through a character. # Read another full line and continue. except UnicodeDecodeError: line = serial.readline().decode('utf-8') time.sleep(1)
💁 Podes encontrar este código na pasta code-gps/pi.
😀 O teu programa para o sensor GPS foi um sucesso!
Aviso Legal:
Este documento foi traduzido utilizando o serviço de tradução por IA Co-op Translator. Embora nos esforcemos pela precisão, esteja ciente de que traduções automáticas podem conter erros ou imprecisões. O documento original na sua língua nativa deve ser considerado a fonte autoritária. Para informações críticas, recomenda-se a tradução profissional realizada por humanos. Não nos responsabilizamos por quaisquer mal-entendidos ou interpretações incorretas decorrentes do uso desta tradução.