7.7 KiB
Lees GPS-gegevens - Virtuele IoT-hardware
In dit deel van de les voeg je een GPS-sensor toe aan je virtuele IoT-apparaat en lees je waarden ervan uit.
Virtuele hardware
Het virtuele IoT-apparaat maakt gebruik van een gesimuleerde GPS-sensor die toegankelijk is via UART via een seriële poort.
Een fysieke GPS-sensor heeft een antenne om radiogolven van GPS-satellieten op te vangen en de GPS-signalen om te zetten in GPS-gegevens. De virtuele versie simuleert dit door je in staat te stellen een breedte- en lengtegraad in te stellen, ruwe NMEA-zinnen te verzenden of een GPX-bestand met meerdere locaties te uploaden die opeenvolgend kunnen worden geretourneerd.
🎓 NMEA-zinnen worden later in deze les behandeld
Voeg de sensor toe aan CounterFit
Om een virtuele GPS-sensor te gebruiken, moet je er een toevoegen aan de CounterFit-app.
Taak - voeg de sensor toe aan CounterFit
Voeg de GPS-sensor toe aan de CounterFit-app.
-
Maak een nieuwe Python-app op je computer in een map genaamd
gps-sensormet een enkel bestand genaamdapp.pyen een Python-virtuele omgeving, en voeg de CounterFit pip-pakketten toe. -
Installeer een extra Pip-pakket om een CounterFit shim te installeren die kan communiceren met op UART gebaseerde sensoren via een seriële verbinding. Zorg ervoor dat je dit installeert vanuit een terminal met de virtuele omgeving geactiveerd.
pip install counterfit-shims-serial -
Zorg ervoor dat de CounterFit-webapp draait.
-
Maak een GPS-sensor aan:
-
In het vak Create sensor in het Sensors-paneel, open het dropdownmenu Sensor type en selecteer UART GPS.
-
Laat de Port ingesteld op /dev/ttyAMA0.
-
Selecteer de knop Add om de GPS-sensor aan te maken op poort
/dev/ttyAMA0.
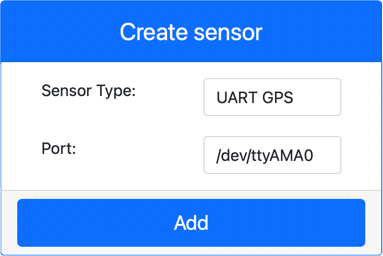
De GPS-sensor wordt aangemaakt en verschijnt in de sensorenlijst.
-
Programmeer de GPS-sensor
Het virtuele IoT-apparaat kan nu worden geprogrammeerd om de virtuele GPS-sensor te gebruiken.
Taak - programmeer de GPS-sensor
Programmeur de GPS-sensor-app.
-
Zorg ervoor dat de
gps-sensor-app geopend is in VS Code. -
Open het bestand
app.py. -
Voeg de volgende code toe aan de bovenkant van
app.pyom de app te verbinden met CounterFit:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Voeg de volgende code hieronder toe om enkele benodigde bibliotheken te importeren, inclusief de bibliotheek voor de CounterFit seriële poort:
import time import counterfit_shims_serial serial = counterfit_shims_serial.Serial('/dev/ttyAMA0')Deze code importeert de
serial-module uit hetcounterfit_shims_serialPip-pakket. Vervolgens maakt het verbinding met de seriële poort/dev/ttyAMA0- dit is het adres van de seriële poort die de virtuele GPS-sensor gebruikt voor zijn UART-poort. -
Voeg de volgende code hieronder toe om van de seriële poort te lezen en de waarden naar de console te printen:
def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)Een functie genaamd
print_gps_datawordt gedefinieerd die de doorgegeven regel naar de console print.Vervolgens loopt de code oneindig door, waarbij in elke lus zoveel mogelijk tekstregels van de seriële poort worden gelezen. Voor elke regel wordt de functie
print_gps_dataaangeroepen.Nadat alle gegevens zijn gelezen, slaapt de lus 1 seconde en probeert het opnieuw.
-
Voer deze code uit, zorg ervoor dat je een andere terminal gebruikt dan degene waarin de CounterFit-app draait, zodat de CounterFit-app blijft draaien.
-
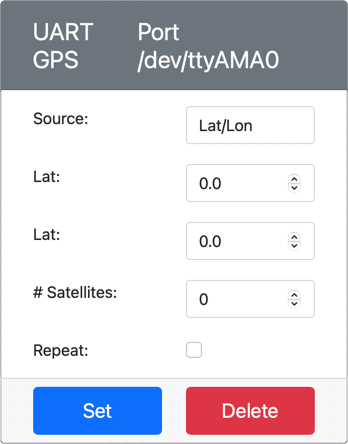
Verander vanuit de CounterFit-app de waarde van de GPS-sensor. Dit kan op een van de volgende manieren:
-
Stel de Source in op
Lat/Lonen stel een specifieke breedtegraad, lengtegraad en aantal satellieten in die worden gebruikt om de GPS-fix te krijgen. Deze waarde wordt slechts één keer verzonden, dus vink het vakje Repeat aan om de gegevens elke seconde te herhalen.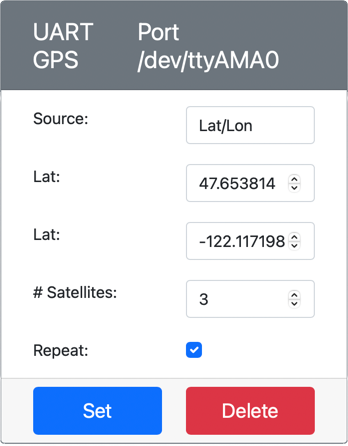
-
Stel de Source in op
NMEAen voeg enkele NMEA-zinnen toe in het tekstvak. Al deze waarden worden verzonden, met een vertraging van 1 seconde voordat elke nieuwe GGA (positie-fix) zin kan worden gelezen.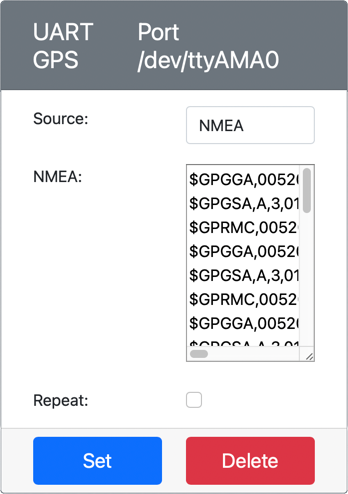
Je kunt een tool zoals nmeagen.org gebruiken om deze zinnen te genereren door op een kaart te tekenen. Deze waarden worden slechts één keer verzonden, dus vink het vakje Repeat aan om de gegevens één seconde na verzending opnieuw te laten herhalen.
-
Stel de Source in op GPX-bestand en upload een GPX-bestand met tracklocaties. Je kunt GPX-bestanden downloaden van een aantal populaire kaart- en wandelwebsites, zoals AllTrails. Deze bestanden bevatten meerdere GPS-locaties als een route, en de GPS-sensor retourneert elke nieuwe locatie met intervallen van 1 seconde.
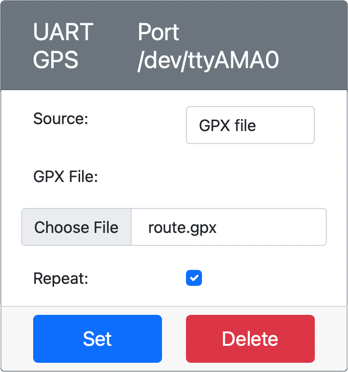
Deze waarden worden slechts één keer verzonden, dus vink het vakje Repeat aan om de gegevens één seconde na verzending opnieuw te laten herhalen.
Zodra je de GPS-instellingen hebt geconfigureerd, selecteer je de knop Set om deze waarden aan de sensor toe te wijzen.
-
-
Je ziet de ruwe uitvoer van de GPS-sensor, iets zoals het volgende:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
💁 Je kunt deze code vinden in de map code-gps/virtual-device.
😀 Je GPS-sensorprogramma is een succes!
Disclaimer:
Dit document is vertaald met behulp van de AI-vertalingsservice Co-op Translator. Hoewel we streven naar nauwkeurigheid, dient u zich ervan bewust te zijn dat geautomatiseerde vertalingen fouten of onnauwkeurigheden kunnen bevatten. Het originele document in zijn oorspronkelijke taal moet worden beschouwd als de gezaghebbende bron. Voor cruciale informatie wordt professionele menselijke vertaling aanbevolen. Wij zijn niet aansprakelijk voor eventuele misverstanden of verkeerde interpretaties die voortvloeien uit het gebruik van deze vertaling.