9.1 KiB
जवळीक शोधा - रास्पबेरी पाय
या धड्याच्या भागात, तुम्ही तुमच्या रास्पबेरी पायमध्ये एक जवळीक सेन्सर जोडाल आणि त्यातून अंतर वाचाल.
हार्डवेअर
रास्पबेरी पायला एक जवळीक सेन्सर आवश्यक आहे.
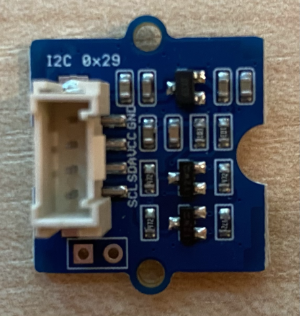
तुम्ही वापरणार असलेला सेन्सर Grove Time of Flight distance sensor आहे. हा सेन्सर लेसर रेंजिंग मॉड्यूल वापरून अंतर शोधतो. या सेन्सरची श्रेणी 10mm ते 2000mm (1cm - 2m) आहे आणि तो या श्रेणीतले मूल्य अचूकपणे नोंदवतो. 1000mm पेक्षा जास्त अंतरासाठी तो 8109mm म्हणून मूल्य नोंदवतो.
लेसर रेंजफाइंडर सेन्सरच्या मागील बाजूस आहे, Grove सॉकेटच्या विरुद्ध बाजूस.
हा एक I²C सेन्सर आहे.
टाइम ऑफ फ्लाइट सेन्सर कनेक्ट करा
Grove टाइम ऑफ फ्लाइट सेन्सर रास्पबेरी पायशी जोडता येतो.
कार्य - टाइम ऑफ फ्लाइट सेन्सर कनेक्ट करा
टाइम ऑफ फ्लाइट सेन्सर कनेक्ट करा.
-
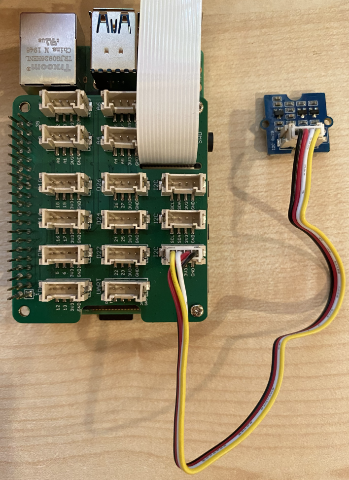
Grove केबलचा एक टोक टाइम ऑफ फ्लाइट सेन्सरच्या सॉकेटमध्ये घाला. ती केवळ एका बाजूनेच जाईल.
-
रास्पबेरी पाय बंद असताना, Grove केबलचे दुसरे टोक Grove Base हॅटवर असलेल्या I²C सॉकेटपैकी एका सॉकेटमध्ये कनेक्ट करा. हे सॉकेट तळाच्या रांगेत आहेत, GPIO पिन्सच्या विरुद्ध बाजूस आणि कॅमेरा केबल स्लॉटच्या शेजारी.
टाइम ऑफ फ्लाइट सेन्सर प्रोग्राम करा
रास्पबेरी पाय आता जोडलेल्या टाइम ऑफ फ्लाइट सेन्सरचा वापर करण्यासाठी प्रोग्राम केला जाऊ शकतो.
कार्य - टाइम ऑफ फ्लाइट सेन्सर प्रोग्राम करा
डिव्हाइस प्रोग्राम करा.
-
पाय चालू करा आणि बूट होण्याची वाट पाहा.
-
fruit-quality-detectorकोड VS Code मध्ये उघडा, थेट पायवर किंवा Remote SSH एक्स्टेंशनद्वारे कनेक्ट करून. -
rpi-vl53l0x Pip पॅकेज इंस्टॉल करा, जे VL53L0X टाइम ऑफ फ्लाइट डिस्टन्स सेन्सरशी संवाद साधणारे Python पॅकेज आहे. खालील pip कमांड वापरून ते इंस्टॉल करा:
pip install rpi-vl53l0x -
या प्रोजेक्टमध्ये एक नवीन फाइल तयार करा ज्याचे नाव
distance-sensor.pyठेवा.💁 अनेक IoT डिव्हाइसचे अनुकरण करण्याचा सोपा मार्ग म्हणजे प्रत्येकासाठी वेगवेगळ्या Python फाइल्स तयार करणे आणि त्यांना एकाच वेळी चालवणे.
-
या फाइलमध्ये खालील कोड जोडा:
import time from grove.i2c import Bus from rpi_vl53l0x.vl53l0x import VL53L0Xहा कोड Grove I²C बस लायब्ररी आणि Grove टाइम ऑफ फ्लाइट सेन्सरमध्ये असलेल्या कोर हार्डवेअर सेन्सरसाठी लायब्ररी आयात करतो.
-
याखाली, सेन्सर ऍक्सेस करण्यासाठी खालील कोड जोडा:
distance_sensor = VL53L0X(bus = Bus().bus) distance_sensor.begin()हा कोड Grove I²C बस वापरून डिस्टन्स सेन्सर घोषित करतो आणि सेन्सर सुरू करतो.
-
शेवटी, अंतर वाचण्यासाठी एक अमर्याद लूप जोडा:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)हा कोड सेन्सरमधून मूल्य वाचण्यासाठी तयार होण्याची वाट पाहतो आणि नंतर ते कन्सोलवर प्रिंट करतो.
-
हा कोड चालवा.
💁 लक्षात ठेवा की ही फाइल
distance-sensor.pyनावाची आहे! हे Python द्वारे चालवा,app.pyनाही. -
तुम्हाला कन्सोलमध्ये अंतर मोजमाप दिसेल. सेन्सरजवळ वस्तू ठेवा आणि तुम्हाला अंतर मोजमाप दिसेल:
pi@raspberrypi:~/fruit-quality-detector $ python3 distance_sensor.py Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmरेंजफाइंडर सेन्सरच्या मागील बाजूस आहे, त्यामुळे अंतर मोजताना योग्य बाजू वापरण्याची खात्री करा.

💁 तुम्ही हा कोड code-proximity/pi फोल्डरमध्ये शोधू शकता.
😀 तुमचा जवळीक सेन्सर प्रोग्राम यशस्वी झाला!
अस्वीकरण:
हा दस्तऐवज AI भाषांतर सेवा Co-op Translator वापरून भाषांतरित करण्यात आला आहे. आम्ही अचूकतेसाठी प्रयत्नशील असलो तरी कृपया लक्षात ठेवा की स्वयंचलित भाषांतरांमध्ये त्रुटी किंवा अचूकतेचा अभाव असू शकतो. मूळ भाषेतील दस्तऐवज हा अधिकृत स्रोत मानला जावा. महत्त्वाच्या माहितीसाठी व्यावसायिक मानवी भाषांतराची शिफारस केली जाते. या भाषांतराचा वापर करून निर्माण होणाऱ्या कोणत्याही गैरसमज किंवा चुकीच्या अर्थासाठी आम्ही जबाबदार राहणार नाही.