5.4 KiB
근접 감지 - Raspberry Pi
이 수업의 이 부분에서는 Raspberry Pi에 근접 센서를 추가하고 센서로부터 거리를 읽는 방법을 배웁니다.
하드웨어
Raspberry Pi에는 근접 센서가 필요합니다.
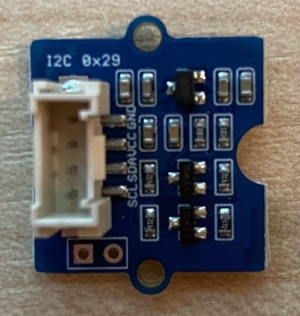
사용할 센서는 Grove Time of Flight 거리 센서입니다. 이 센서는 레이저 측정 모듈을 사용하여 거리를 감지합니다. 이 센서는 10mm에서 2000mm(1cm - 2m) 범위의 거리를 감지하며, 1000mm 이상의 거리는 8109mm로 보고됩니다.
레이저 거리 측정기는 센서의 뒷면, Grove 소켓의 반대쪽에 있습니다.
이 센서는 I²C 센서입니다.
Time of Flight 센서 연결하기
Grove Time of Flight 센서를 Raspberry Pi에 연결할 수 있습니다.
작업 - Time of Flight 센서 연결하기
Time of Flight 센서를 연결하세요.
-
Grove 케이블의 한쪽 끝을 Time of Flight 센서의 소켓에 삽입합니다. 케이블은 한 방향으로만 삽입됩니다.
-
Raspberry Pi의 전원을 끈 상태에서 Grove 케이블의 다른 끝을 Pi에 부착된 Grove Base Hat의 I²C로 표시된 소켓 중 하나에 연결합니다. 이 소켓은 하단 행에 있으며, GPIO 핀의 반대쪽 끝과 카메라 케이블 슬롯 옆에 위치합니다.

Time of Flight 센서 프로그래밍하기
이제 Raspberry Pi를 프로그래밍하여 연결된 Time of Flight 센서를 사용할 수 있습니다.
작업 - Time of Flight 센서 프로그래밍하기
장치를 프로그래밍하세요.
-
Pi의 전원을 켜고 부팅이 완료될 때까지 기다립니다.
-
VS Code에서
fruit-quality-detector코드를 엽니다. Pi에서 직접 열거나 Remote SSH 확장을 통해 연결합니다. -
VL53L0X Time of Flight 거리 센서와 상호작용하는 Python 패키지인 rpi-vl53l0x Pip 패키지를 설치합니다. 다음 pip 명령을 사용하여 설치하세요:
pip install rpi-vl53l0x -
이 프로젝트에
distance-sensor.py라는 새 파일을 만듭니다.💁 여러 IoT 장치를 시뮬레이션하는 쉬운 방법은 각각을 다른 Python 파일에 작성한 후 동시에 실행하는 것입니다.
-
이 파일에 다음 코드를 추가하세요:
import time from grove.i2c import Bus from rpi_vl53l0x.vl53l0x import VL53L0X이는 Grove I²C 버스 라이브러리와 Grove Time of Flight 센서에 내장된 핵심 센서 하드웨어를 위한 센서 라이브러리를 가져옵니다.
-
그 아래에 센서를 액세스하기 위한 다음 코드를 추가하세요:
distance_sensor = VL53L0X(bus = Bus().bus) distance_sensor.begin()이 코드는 Grove I²C 버스를 사용하여 거리 센서를 선언한 후 센서를 시작합니다.
-
마지막으로, 거리를 읽기 위한 무한 루프를 추가하세요:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)이 코드는 센서에서 값을 읽을 준비가 될 때까지 기다린 후 콘솔에 값을 출력합니다.
-
이 코드를 실행하세요.
💁 이 파일의 이름은
distance-sensor.py입니다!app.py가 아닌 Python을 통해 실행해야 합니다. -
콘솔에 거리 측정값이 나타나는 것을 볼 수 있습니다. 센서 근처에 물체를 배치하면 거리 측정값이 표시됩니다:
pi@raspberrypi:~/fruit-quality-detector $ python3 distance_sensor.py Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mm거리 측정기는 센서의 뒷면에 있으므로 거리를 측정할 때 올바른 쪽을 사용해야 합니다.

💁 이 코드는 code-proximity/pi 폴더에서 찾을 수 있습니다.
😀 근접 센서 프로그램이 성공적으로 작동했습니다!
면책 조항:
이 문서는 AI 번역 서비스 Co-op Translator를 사용하여 번역되었습니다. 정확성을 위해 최선을 다하고 있지만, 자동 번역에는 오류나 부정확성이 포함될 수 있습니다. 원본 문서를 해당 언어로 작성된 상태에서 권위 있는 자료로 간주해야 합니다. 중요한 정보의 경우, 전문적인 인간 번역을 권장합니다. 이 번역 사용으로 인해 발생하는 오해나 잘못된 해석에 대해 당사는 책임을 지지 않습니다.