8.5 KiB
GPSデータを読み取る - 仮想IoTハードウェア
このレッスンのこの部分では、仮想IoTデバイスにGPSセンサーを追加し、その値を読み取ります。
仮想ハードウェア
仮想IoTデバイスは、シリアルポートを介してUARTでアクセス可能なシミュレートされたGPSセンサーを使用します。
物理的なGPSセンサーには、GPS衛星からの電波を受信するためのアンテナがあり、GPS信号をGPSデータに変換します。仮想版では、緯度と経度を設定したり、生のNMEA文を送信したり、複数の位置を含むGPXファイルをアップロードして順次返すことができます。
🎓 NMEA文については、このレッスンの後半で説明します。
CounterFitにセンサーを追加する
仮想GPSセンサーを使用するには、CounterFitアプリにセンサーを追加する必要があります。
タスク - CounterFitにセンサーを追加する
CounterFitアプリにGPSセンサーを追加します。
-
gps-sensorというフォルダーに単一のファイルapp.pyを含む新しいPythonアプリを作成し、Python仮想環境を設定して、CounterFitのpipパッケージを追加します。⚠️ 必要に応じて、レッスン1のCounterFit Pythonプロジェクトの作成と設定に関する手順を参照してください。
-
シリアル接続を介してUARTベースのセンサーと通信できるCounterFitシムをインストールするための追加のPipパッケージをインストールします。この操作は、仮想環境が有効化されたターミナルで行ってください。
pip install counterfit-shims-serial -
CounterFitウェブアプリが実行中であることを確認します。
-
GPSセンサーを作成します:
-
SensorsペインのCreate sensorボックスで、Sensor typeドロップダウンを開き、UART GPSを選択します。
-
Portは*/dev/ttyAMA0*のままにします。
-
Addボタンを選択して、ポート
/dev/ttyAMA0にGPSセンサーを作成します。
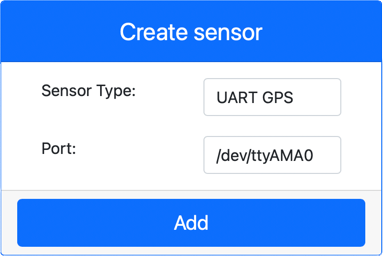
GPSセンサーが作成され、センサーリストに表示されます。
-
GPSセンサーをプログラムする
仮想IoTデバイスは、仮想GPSセンサーを使用するようにプログラムできます。
タスク - GPSセンサーをプログラムする
GPSセンサーアプリをプログラムします。
-
gps-sensorアプリがVS Codeで開かれていることを確認します。 -
app.pyファイルを開きます。 -
CounterFitにアプリを接続するために、以下のコードを
app.pyの先頭に追加します:from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
必要なライブラリをインポートするために、以下のコードをその下に追加します。これには、CounterFitシリアルポート用のライブラリも含まれます:
import time import counterfit_shims_serial serial = counterfit_shims_serial.Serial('/dev/ttyAMA0')このコードは、
counterfit_shims_serialPipパッケージからserialモジュールをインポートします。その後、仮想GPSセンサーがUARTポート用に使用するシリアルポート/dev/ttyAMA0に接続します。 -
シリアルポートからデータを読み取り、値をコンソールに出力するために、以下のコードをその下に追加します:
def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)print_gps_dataという関数が定義され、渡された行をコンソールに出力します。次に、コードは無限ループで動作し、各ループでシリアルポートから可能な限り多くのテキスト行を読み取ります。各行に対して
print_gps_data関数を呼び出します。すべてのデータが読み取られた後、ループは1秒間スリープし、再試行します。
-
このコードを実行します。CounterFitアプリが実行中のターミナルとは別のターミナルを使用して実行してください。CounterFitアプリが引き続き実行されるようにします。
-
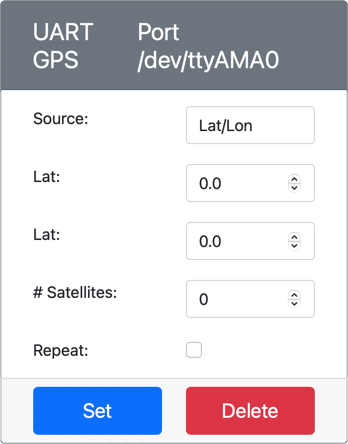
CounterFitアプリからGPSセンサーの値を変更します。以下のいずれかの方法で行うことができます:
-
Sourceを
Lat/Lonに設定し、明示的な緯度、経度、およびGPS固定に使用される衛星の数を設定します。この値は一度だけ送信されるため、データを毎秒繰り返すにはRepeatボックスをチェックします。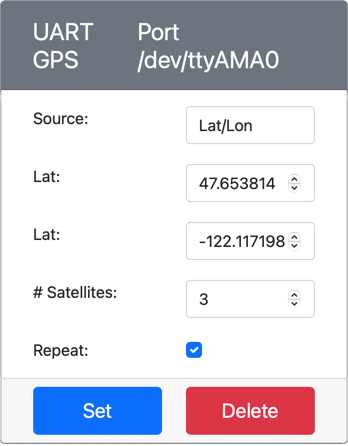
-
Sourceを
NMEAに設定し、NMEA文をテキストボックスに追加します。これらの値はすべて送信され、各新しいGGA(位置固定)文が読み取られる前に1秒の遅延があります。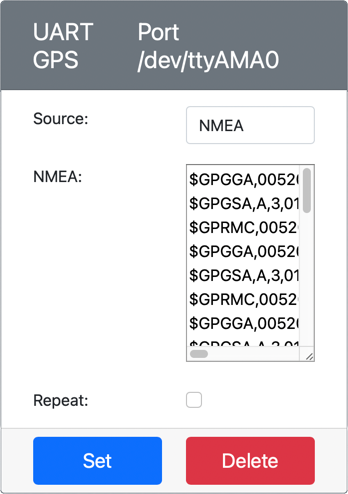
nmeagen.orgのようなツールを使用して、地図上で描画してこれらの文を生成できます。これらの値は一度だけ送信されるため、すべて送信された後に1秒間隔でデータを繰り返すにはRepeatボックスをチェックします。
-
SourceをGPXファイルに設定し、トラック位置を含むGPXファイルをアップロードします。AllTrailsのような人気のある地図やハイキングサイトからGPXファイルをダウンロードできます。これらのファイルにはトレイルとして複数のGPS位置が含まれており、GPSセンサーは1秒間隔で各新しい位置を返します。
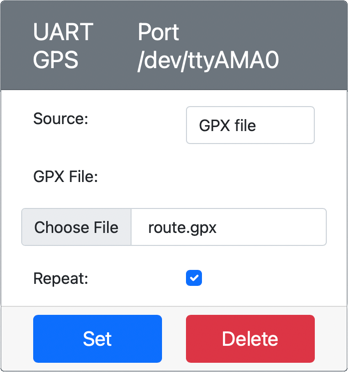
これらの値は一度だけ送信されるため、すべて送信された後に1秒間隔でデータを繰り返すにはRepeatボックスをチェックします。
GPS設定を構成したら、Setボタンを選択してこれらの値をセンサーにコミットします。
-
-
GPSセンサーからの生データ出力が以下のように表示されます:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67
💁 このコードはcode-gps/virtual-deviceフォルダーにあります。
😀 GPSセンサーのプログラムが成功しました!
免責事項:
この文書は、AI翻訳サービス Co-op Translator を使用して翻訳されています。正確性を期すよう努めておりますが、自動翻訳には誤りや不正確な部分が含まれる可能性があります。元の言語で記載された原文が公式な情報源と見なされるべきです。重要な情報については、専門の人間による翻訳を推奨します。本翻訳の使用に起因する誤解や誤認について、当方は一切の責任を負いません。