8.5 KiB
Membaca Data GPS - Raspberry Pi
Dalam bagian pelajaran ini, Anda akan menambahkan sensor GPS ke Raspberry Pi dan membaca nilai-nilai darinya.
Perangkat Keras
Raspberry Pi membutuhkan sensor GPS.
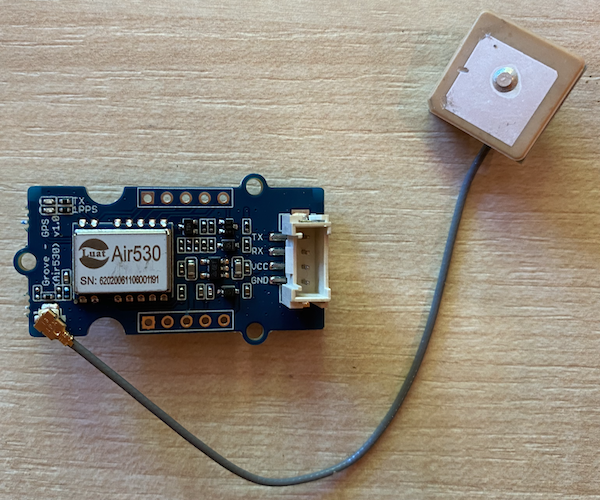
Sensor yang akan Anda gunakan adalah Grove GPS Air530 sensor. Sensor ini dapat terhubung ke beberapa sistem GPS untuk mendapatkan posisi yang cepat dan akurat. Sensor ini terdiri dari 2 bagian - komponen inti elektronik sensor, dan antena eksternal yang terhubung dengan kabel tipis untuk menangkap gelombang radio dari satelit.
Ini adalah sensor UART, sehingga mengirimkan data GPS melalui UART.
Menghubungkan Sensor GPS
Sensor GPS Grove dapat dihubungkan ke Raspberry Pi.
Tugas - Menghubungkan Sensor GPS
Hubungkan sensor GPS.
-
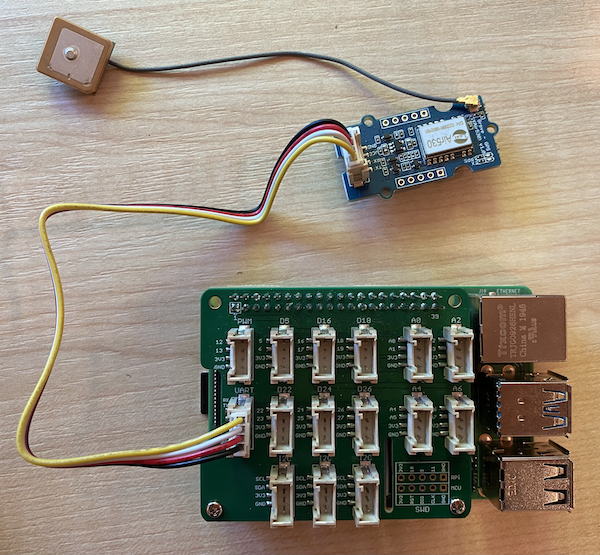
Masukkan salah satu ujung kabel Grove ke soket pada sensor GPS. Kabel ini hanya dapat masuk dengan satu arah.
-
Dengan Raspberry Pi dalam keadaan mati, hubungkan ujung lain kabel Grove ke soket UART yang ditandai UART pada Grove Base hat yang terpasang di Pi. Soket ini berada di baris tengah, di sisi yang paling dekat dengan slot kartu SD, ujung yang berlawanan dari port USB dan soket ethernet.
-
Posisikan sensor GPS sehingga antena yang terpasang memiliki visibilitas ke langit - idealnya di dekat jendela yang terbuka atau di luar ruangan. Sinyal akan lebih jelas jika tidak ada penghalang di sekitar antena.
Memprogram Sensor GPS
Raspberry Pi sekarang dapat diprogram untuk menggunakan sensor GPS yang terpasang.
Tugas - Memprogram Sensor GPS
Program perangkat.
-
Nyalakan Pi dan tunggu hingga selesai booting.
-
Sensor GPS memiliki 2 LED - LED biru yang berkedip saat data dikirimkan, dan LED hijau yang berkedip setiap detik saat menerima data dari satelit. Pastikan LED biru berkedip saat Anda menyalakan Pi. Setelah beberapa menit, LED hijau akan mulai berkedip - jika tidak, Anda mungkin perlu memposisikan ulang antena.
-
Luncurkan VS Code, baik langsung di Pi, atau sambungkan melalui ekstensi Remote SSH.
⚠️ Anda dapat merujuk ke instruksi untuk mengatur dan meluncurkan VS Code di pelajaran 1 jika diperlukan.
-
Dengan versi Raspberry Pi yang lebih baru yang mendukung Bluetooth, terdapat konflik antara port serial yang digunakan untuk Bluetooth dan yang digunakan oleh port Grove UART. Untuk mengatasi ini, lakukan langkah-langkah berikut:
-
Dari terminal VS Code, edit file
/boot/config.txtmenggunakannano, editor teks bawaan terminal, dengan perintah berikut:sudo nano /boot/config.txtFile ini tidak dapat diedit oleh VS Code karena Anda perlu mengeditnya dengan izin
sudo, yaitu izin yang lebih tinggi. VS Code tidak berjalan dengan izin ini. -
Gunakan tombol panah untuk menavigasi ke akhir file, lalu salin kode di bawah ini dan tempelkan di akhir file:
dtoverlay=pi3-miniuart-bt dtoverlay=pi3-disable-bt enable_uart=1Anda dapat menempelkan menggunakan pintasan keyboard normal untuk perangkat Anda (
Ctrl+vdi Windows, Linux, atau Raspberry Pi OS,Cmd+vdi macOS). -
Simpan file ini dan keluar dari nano dengan menekan
Ctrl+x. Tekanysaat ditanya apakah Anda ingin menyimpan buffer yang telah dimodifikasi, lalu tekanenteruntuk mengonfirmasi bahwa Anda ingin menimpa/boot/config.txt.Jika Anda membuat kesalahan, Anda dapat keluar tanpa menyimpan, lalu ulangi langkah-langkah ini.
-
Edit file
/boot/cmdline.txtdi nano dengan perintah berikut:sudo nano /boot/cmdline.txt -
File ini memiliki sejumlah pasangan kunci/nilai yang dipisahkan oleh spasi. Hapus pasangan kunci/nilai untuk kunci
console. Mereka mungkin terlihat seperti ini:console=serial0,115200 console=tty1Anda dapat menavigasi ke entri ini menggunakan tombol panah, lalu menghapusnya menggunakan tombol
delataubackspace.Sebagai contoh, jika file asli Anda terlihat seperti ini:
console=serial0,115200 console=tty1 root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwaitVersi baru akan menjadi:
root=PARTUUID=058e2867-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait -
Ikuti langkah-langkah di atas untuk menyimpan file ini dan keluar dari nano.
-
Restart Pi Anda, lalu sambungkan kembali di VS Code setelah Pi selesai reboot.
-
-
Dari terminal, buat folder baru di direktori home pengguna
pibernamagps-sensor. Buat file di folder ini bernamaapp.py. -
Buka folder ini di VS Code.
-
Modul GPS mengirimkan data UART melalui port serial. Instal paket Pip
pyserialuntuk berkomunikasi dengan port serial dari kode Python Anda:pip3 install pyserial -
Tambahkan kode berikut ke file
app.pyAnda:import time import serial serial = serial.Serial('/dev/ttyAMA0', 9600, timeout=1) serial.reset_input_buffer() serial.flush() def print_gps_data(line): print(line.rstrip()) while True: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data(line) line = serial.readline().decode('utf-8') time.sleep(1)Kode ini mengimpor modul
serialdari paket Pippyserial. Kemudian terhubung ke port serial/dev/ttyAMA0- ini adalah alamat port serial yang digunakan oleh Grove Pi Base Hat untuk port UART-nya. Kode ini kemudian membersihkan data yang ada dari koneksi serial ini.Selanjutnya, sebuah fungsi bernama
print_gps_datadidefinisikan yang mencetak baris yang diteruskan kepadanya ke konsol.Kemudian kode ini melakukan loop selamanya, membaca sebanyak mungkin baris teks dari port serial dalam setiap loop. Kode ini memanggil fungsi
print_gps_datauntuk setiap baris.Setelah semua data dibaca, loop akan tidur selama 1 detik, lalu mencoba lagi.
-
Jalankan kode ini. Anda akan melihat output mentah dari sensor GPS, sesuatu seperti berikut:
$GNGGA,020604.001,4738.538654,N,12208.341758,W,1,3,,164.7,M,-17.1,M,,*67 $GPGSA,A,1,,,,,,,,,,,,,,,*1E $BDGSA,A,1,,,,,,,,,,,,,,,*0F $GPGSV,1,1,00*79 $BDGSV,1,1,00*68Jika Anda mendapatkan salah satu dari kesalahan berikut saat menghentikan dan memulai ulang kode Anda, tambahkan blok
try - exceptke dalam loopwhileAnda.UnicodeDecodeError: 'utf-8' codec can't decode byte 0x93 in position 0: invalid start byte UnicodeDecodeError: 'utf-8' codec can't decode byte 0xf1 in position 0: invalid continuation bytewhile True: try: line = serial.readline().decode('utf-8') while len(line) > 0: print_gps_data() line = serial.readline().decode('utf-8') # There's a random chance the first byte being read is part way through a character. # Read another full line and continue. except UnicodeDecodeError: line = serial.readline().decode('utf-8') time.sleep(1)
💁 Anda dapat menemukan kode ini di folder code-gps/pi.
😀 Program sensor GPS Anda berhasil!
Penafian:
Dokumen ini telah diterjemahkan menggunakan layanan penerjemahan AI Co-op Translator. Meskipun kami berusaha untuk memberikan hasil yang akurat, harap diperhatikan bahwa terjemahan otomatis mungkin mengandung kesalahan atau ketidakakuratan. Dokumen asli dalam bahasa aslinya harus dianggap sebagai sumber yang otoritatif. Untuk informasi yang bersifat kritis, disarankan menggunakan jasa penerjemahan profesional oleh manusia. Kami tidak bertanggung jawab atas kesalahpahaman atau penafsiran yang keliru yang timbul dari penggunaan terjemahan ini.