|
|
4 weeks ago | |
|---|---|---|
| .. | ||
| README.md | 4 weeks ago | |
| assignment.md | 4 weeks ago | |
| pi-camera.md | 4 weeks ago | |
| single-board-computer-classify-image.md | 4 weeks ago | |
| virtual-device-camera.md | 4 weeks ago | |
| wio-terminal-camera.md | 4 weeks ago | |
| wio-terminal-classify-image.md | 4 weeks ago | |
README.md
從 IoT 裝置檢查水果品質
手繪筆記由 Nitya Narasimhan 提供。點擊圖片以查看更大版本。
課前測驗
簡介
在上一課中,你學習了關於影像分類器的知識,以及如何訓練它們來檢測優質和劣質水果。要在 IoT 應用中使用這個影像分類器,你需要能夠使用某種攝影機捕捉影像,並將該影像發送到雲端進行分類。
在本課中,你將學習攝影機感測器的相關知識,以及如何將它們與 IoT 裝置結合使用來捕捉影像。此外,你還會學習如何從 IoT 裝置呼叫影像分類器。
本課內容包括:
攝影機感測器
顧名思義,攝影機感測器是可以連接到 IoT 裝置的攝影機。它們可以拍攝靜態影像或錄製串流影片。有些會返回原始影像數據,而另一些則會將影像數據壓縮成 JPEG 或 PNG 等影像檔案。通常,與 IoT 裝置配合使用的攝影機比你習慣使用的攝影機要小得多,解析度也較低,但你也可以找到解析度高到可以媲美高端手機的攝影機。你還可以選擇各種可更換鏡頭、多攝影機配置、紅外線熱成像攝影機或紫外線攝影機。
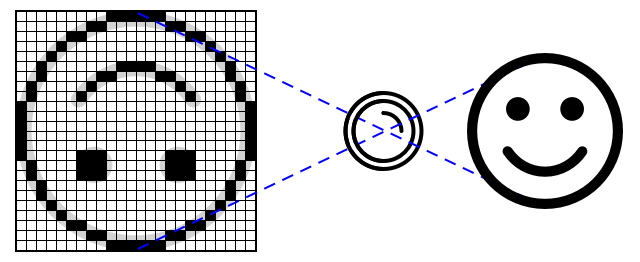
大多數攝影機感測器使用影像感測器,其中每個像素都是一個光電二極管。鏡頭將影像聚焦到影像感測器上,數千或數百萬個光電二極管檢測落在每個二極管上的光線,並將其記錄為像素數據。
💁 鏡頭會將影像倒置,攝影機感測器會將影像翻轉回正確方向。這與你的眼睛相同——你看到的影像在眼睛後部是倒置的,而你的大腦會將其校正。
🎓 影像感測器被稱為主動像素感測器(Active-Pixel Sensor, APS),最常見的 APS 類型是互補金屬氧化物半導體感測器(CMOS)。你可能聽說過 CMOS 感測器這個術語。
攝影機感測器是數位感測器,通常借助提供通訊的函式庫以數位數據的形式傳輸影像數據。攝影機使用像 SPI 這樣的協議進行連接,以便傳輸大量數據——影像的數據量遠大於溫度感測器等感測器的單一數值。
✅ IoT 裝置在影像大小方面有哪些限制?請考慮特別是微控制器硬體的限制。
使用 IoT 裝置捕捉影像
你可以使用 IoT 裝置捕捉影像進行分類。
任務 - 使用 IoT 裝置捕捉影像
按照相關指南,使用你的 IoT 裝置捕捉影像:
發佈你的影像分類器
你在上一課中訓練了你的影像分類器。在你能從 IoT 裝置使用它之前,你需要先發佈該模型。
模型迭代
當你在上一課中訓練模型時,你可能注意到 Performance 標籤的側邊顯示了迭代次數。當你第一次訓練模型時,你會看到訓練中的 Iteration 1。當你使用預測影像改進模型時,你會看到訓練中的 Iteration 2。
每次訓練模型時,你都會得到一個新的迭代版本。這是一種記錄基於不同數據集訓練的模型不同版本的方法。當你進行 Quick Test 時,可以使用下拉選單選擇迭代版本,從而比較多個迭代版本的結果。
當你對某個迭代版本感到滿意時,可以將其發佈,使其能夠被外部應用使用。這樣,你可以有一個已發佈的版本供裝置使用,然後在多次迭代中改進新版本,並在滿意後發佈。
任務 - 發佈一個迭代版本
迭代版本可以從 Custom Vision 入口網站發佈。
-
開啟 CustomVision.ai 入口網站並登入(如果尚未開啟)。然後打開你的
fruit-quality-detector專案。 -
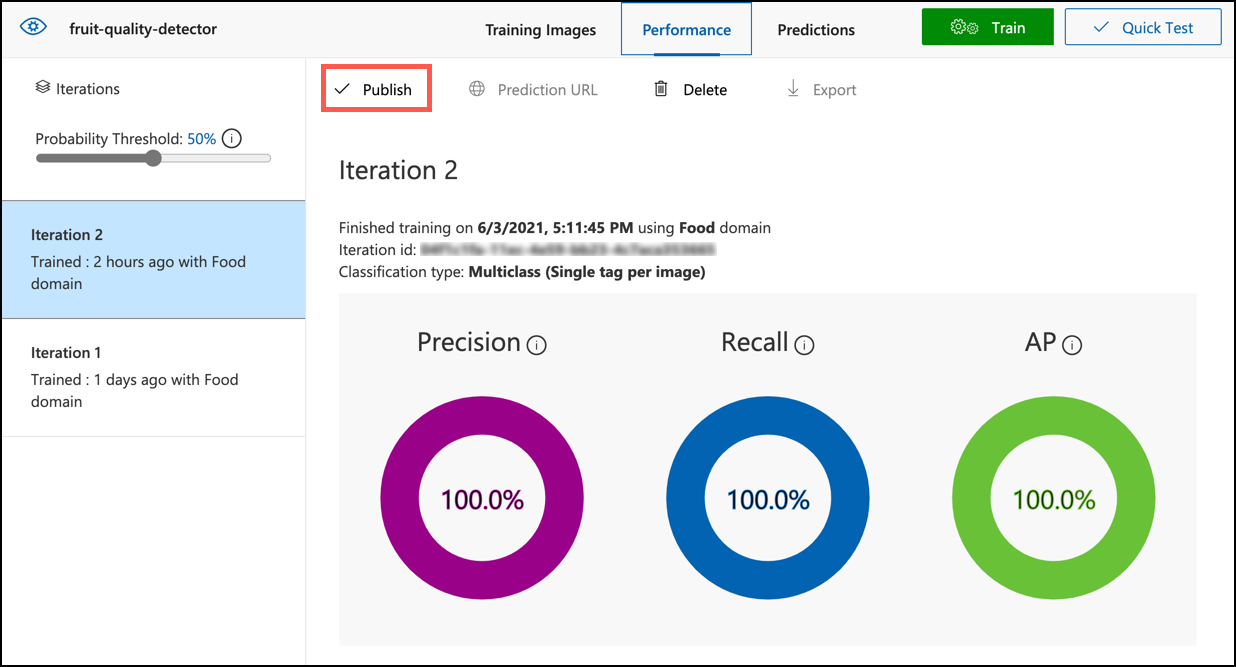
從頂部選項中選擇 Performance 標籤。
-
從側邊的 Iterations 列表中選擇最新的迭代版本。
-
選擇該迭代版本的 Publish 按鈕。
-
在 Publish Model 對話框中,將 Prediction resource 設置為你在上一課中創建的
fruit-quality-detector-prediction資源。將名稱保留為Iteration2,然後選擇 Publish 按鈕。 -
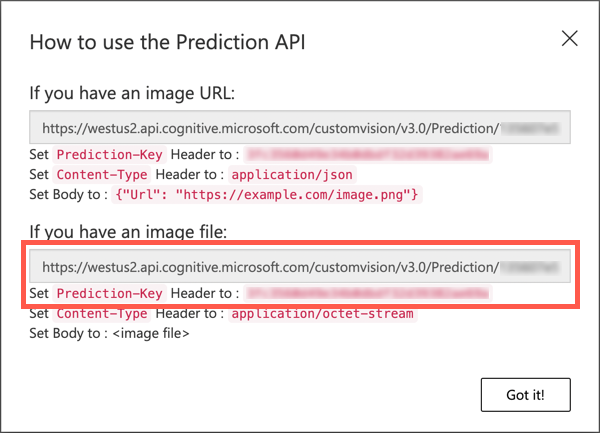
發佈後,選擇 Prediction URL 按鈕。這將顯示預測 API 的詳細資訊,你需要這些資訊來從 IoT 裝置呼叫模型。下方部分標記為 If you have an image file,這是你需要的詳細資訊。複製顯示的 URL,該 URL 可能類似於:
https://<location>.api.cognitive.microsoft.com/customvision/v3.0/Prediction/<id>/classify/iterations/Iteration2/image其中
<location>是你創建 Custom Vision 資源時使用的位置,而<id>是由字母和數字組成的長 ID。同時複製 Prediction-Key 值。這是一個安全密鑰,當你呼叫模型時必須傳遞該密鑰。只有傳遞此密鑰的應用程式才能使用該模型,其他應用程式將被拒絕。
✅ 當發佈一個新迭代版本時,它會有一個不同的名稱。你認為應該如何更改 IoT 裝置使用的迭代版本?
從 IoT 裝置分類影像
現在你可以使用這些連接詳細資訊從 IoT 裝置呼叫影像分類器。
任務 - 從 IoT 裝置分類影像
按照相關指南,使用你的 IoT 裝置分類影像:
改進模型
你可能會發現,使用連接到 IoT 裝置的攝影機時獲得的結果與你預期的不符。預測結果並不總是像從電腦上傳的影像那樣準確。這是因為模型的訓練數據與用於預測的數據不同。
為了讓影像分類器獲得最佳結果,你需要使用與預測影像盡可能相似的影像來訓練模型。例如,如果你使用手機攝影機捕捉影像進行訓練,那麼影像的質量、清晰度和顏色將與連接到 IoT 裝置的攝影機不同。
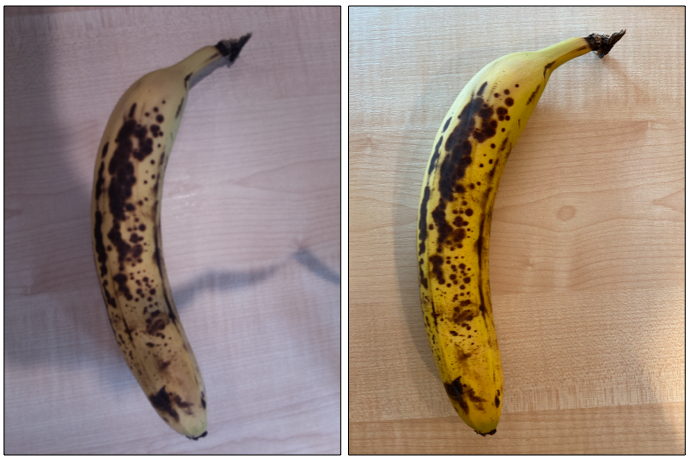
在上圖中,左側的香蕉圖片是使用 Raspberry Pi 攝影機拍攝的,右側的圖片是使用 iPhone 在相同位置拍攝的同一根香蕉。兩者的質量有明顯差異——iPhone 的圖片更清晰,顏色更鮮豔,對比度更高。
✅ 還有哪些因素可能導致 IoT 裝置捕捉的影像預測不準確?請考慮 IoT 裝置可能使用的環境,哪些因素會影響捕捉的影像?
為了改進模型,你可以使用 IoT 裝置捕捉的影像重新訓練模型。
任務 - 改進模型
-
使用你的 IoT 裝置分類多張成熟和未成熟水果的影像。
-
在 Custom Vision 入口網站中,使用 Predictions 標籤上的影像重新訓練模型。
⚠️ 如果需要,可以參考第一課中重新訓練分類器的指導。
-
如果你的影像與最初用於訓練的影像差異很大,可以通過在 Training Images 標籤中選擇影像並點擊 Delete 按鈕刪除所有原始影像。將游標移到影像上會出現一個勾選框,點擊該框即可選擇或取消選擇影像。
-
訓練模型的新迭代版本,並按照上述步驟發佈。
-
更新程式碼中的端點 URL,並重新運行應用程式。
-
重複這些步驟,直到你對預測結果感到滿意。
🚀 挑戰
影像解析度或光線對預測有多大影響?
嘗試在裝置程式碼中更改影像的解析度,看看是否對影像質量產生影響。同時嘗試更改光線條件。
如果你要製作一個銷售給農場或工廠的生產裝置,你會如何確保它始終提供一致的結果?
課後測驗
回顧與自學
你使用入口網站訓練了自訂視覺模型。這依賴於擁有可用的影像——而在現實世界中,你可能無法獲得與裝置攝影機捕捉的影像相匹配的訓練數據。你可以通過使用訓練 API 直接從裝置進行訓練來解決這個問題,從而使用 IoT 裝置捕捉的影像訓練模型。
- 閱讀 使用 Custom Vision SDK 快速入門 中的訓練 API 相關內容。
作業
免責聲明:
本文件已使用人工智能翻譯服務 Co-op Translator 進行翻譯。儘管我們致力於提供準確的翻譯,請注意自動翻譯可能包含錯誤或不準確之處。原始文件的母語版本應被視為權威來源。對於重要資訊,建議使用專業人工翻譯。我們對因使用此翻譯而引起的任何誤解或錯誤解釋概不負責。