5.7 KiB
זיהוי קרבה - Wio Terminal
בחלק זה של השיעור, תוסיף חיישן קרבה ל-Wio Terminal שלך ותמדוד מרחק באמצעותו.
חומרה
ה-Wio Terminal זקוק לחיישן קרבה.
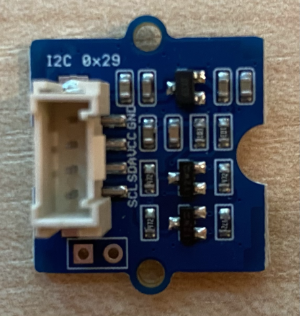
החיישן שבו תשתמש הוא חיישן מרחק Grove Time of Flight. חיישן זה משתמש במודול לייזר למדידת מרחק. טווח החיישן הוא בין 10 מ"מ ל-2000 מ"מ (1 ס"מ - 2 מ'), והוא מדווח ערכים בטווח זה בדיוק גבוה, כאשר מרחקים מעל 1000 מ"מ מדווחים כ-8109 מ"מ.
מד המרחק בלייזר נמצא בצד האחורי של החיישן, בצד ההפוך לשקע Grove.
זהו שקע I2C.
חיבור חיישן Time of Flight
ניתן לחבר את חיישן Time of Flight ל-Wio Terminal.
משימה - חיבור חיישן Time of Flight
חבר את חיישן Time of Flight.
-
הכנס קצה אחד של כבל Grove לשקע בחיישן Time of Flight. הכבל ייכנס רק בכיוון אחד.
-
כאשר ה-Wio Terminal מנותק מהמחשב או ממקור כוח אחר, חבר את הקצה השני של כבל Grove לשקע Grove בצד השמאלי של ה-Wio Terminal כשאתה מסתכל על המסך. זהו השקע הקרוב ביותר לכפתור ההפעלה. זהו שקע משולב דיגיטלי ו-I2C.
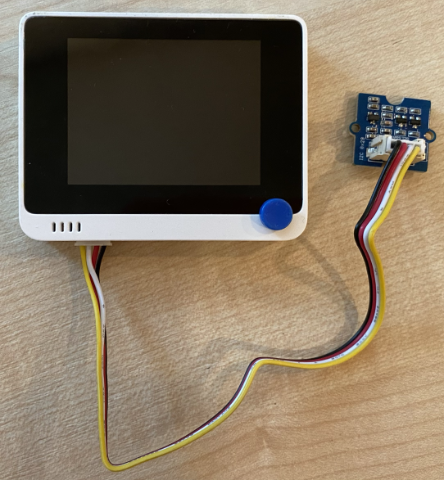
- כעת תוכל לחבר את ה-Wio Terminal למחשב שלך.
תכנות חיישן Time of Flight
כעת ניתן לתכנת את ה-Wio Terminal לשימוש בחיישן Time of Flight המחובר.
משימה - תכנות חיישן Time of Flight
-
צור פרויקט חדש ל-Wio Terminal באמצעות PlatformIO. קרא לפרויקט זה
distance-sensor. הוסף קוד לפונקציהsetupכדי להגדיר את יציאת הסריאל. -
הוסף תלות ספרייה עבור ספריית חיישן המרחק Seeed Grove Time of Flight לקובץ
platformio.iniשל הפרויקט:lib_deps = seeed-studio/Grove Ranging sensor - VL53L0X @ ^1.1.1 -
בקובץ
main.cpp, הוסף את הקוד הבא מתחת להוראות ה-include הקיימות כדי להכריז על מופע של מחלקתSeeed_vl53l0xלצורך אינטראקציה עם חיישן Time of Flight:#include "Seeed_vl53l0x.h" Seeed_vl53l0x VL53L0X; -
הוסף את הקוד הבא לתחתית פונקציית
setupכדי לאתחל את החיישן:VL53L0X.VL53L0X_common_init(); VL53L0X.VL53L0X_high_accuracy_ranging_init(); -
בפונקציית
loop, קרא ערך מהחיישן:VL53L0X_RangingMeasurementData_t RangingMeasurementData; memset(&RangingMeasurementData, 0, sizeof(VL53L0X_RangingMeasurementData_t)); VL53L0X.PerformSingleRangingMeasurement(&RangingMeasurementData);קוד זה מאתחל מבנה נתונים לקריאה, ואז מעביר אותו לשיטת
PerformSingleRangingMeasurementשבה הוא יתמלא במדידת המרחק. -
מתחת לכך, כתוב את מדידת המרחק ולאחר מכן הוסף השהיה של שנייה אחת:
Serial.print("Distance = "); Serial.print(RangingMeasurementData.RangeMilliMeter); Serial.println(" mm"); delay(1000); -
בנה, העלה והרץ את הקוד הזה. תוכל לראות מדידות מרחק באמצעות צג הסריאל. מקם אובייקטים ליד החיישן ותראה את מדידת המרחק:
Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmמד המרחק נמצא בצד האחורי של החיישן, אז וודא שאתה משתמש בצד הנכון בעת מדידת מרחק.

💁 תוכל למצוא את הקוד הזה בתיקיית code-proximity/wio-terminal.
😀 תוכנית חיישן הקרבה שלך הצליחה!
כתב ויתור:
מסמך זה תורגם באמצעות שירות תרגום מבוסס בינה מלאכותית Co-op Translator. בעוד שאנו שואפים לדיוק, יש להיות מודעים לכך שתרגומים אוטומטיים עשויים להכיל שגיאות או אי דיוקים. המסמך המקורי בשפתו המקורית צריך להיחשב כמקור סמכותי. עבור מידע קריטי, מומלץ להשתמש בתרגום מקצועי על ידי אדם. איננו נושאים באחריות לאי הבנות או לפרשנויות שגויות הנובעות משימוש בתרגום זה.