9.5 KiB
לצלם תמונה - Raspberry Pi
בחלק זה של השיעור, תוסיפו חיישן מצלמה ל-Raspberry Pi שלכם ותצלמו תמונות באמצעותו.
חומרה
ה-Raspberry Pi זקוק למצלמה.
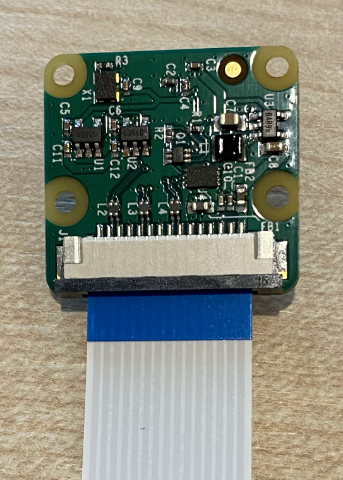
המצלמה שתשתמשו בה היא מודול מצלמה של Raspberry Pi. מצלמה זו תוכננה לעבוד עם ה-Raspberry Pi ומתחברת באמצעות מחבר ייעודי על הלוח.
💁 מצלמה זו משתמשת ב-Camera Serial Interface, פרוטוקול של Mobile Industry Processor Interface Alliance, הידוע כ-MIPI-CSI. זהו פרוטוקול ייעודי לשליחת תמונות.
חיבור המצלמה
ניתן לחבר את המצלמה ל-Raspberry Pi באמצעות כבל סרט.
משימה - חיבור המצלמה

-
כבו את ה-Pi.
-
חברו את כבל הסרט שמגיע עם המצלמה למצלמה. לשם כך, משכו בעדינות את הקליפס השחור במחזיק כך שייצא מעט, ואז החליקו את הכבל לתוך השקע, כאשר הצד הכחול פונה הרחק מהעדשה, והפסים המתכתיים פונים לכיוון העדשה. לאחר שהכבל נכנס עד הסוף, דחפו את הקליפס השחור חזרה למקומו.
ניתן למצוא אנימציה שמראה כיצד לפתוח את הקליפס ולהכניס את הכבל בתיעוד Raspberry Pi Getting Started with the Camera module.
-
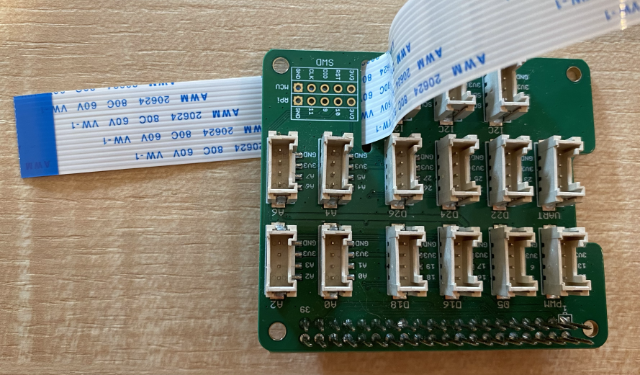
הסירו את ה-Grove Base Hat מה-Pi.
-
העבירו את כבל הסרט דרך החריץ למצלמה ב-Grove Base Hat. ודאו שהצד הכחול של הכבל פונה לכיוון הפורטים האנלוגיים המסומנים A0, A1 וכו'.
-
הכניסו את כבל הסרט לשקע המצלמה ב-Pi. שוב, משכו את הקליפס השחור למעלה, הכניסו את הכבל, ואז דחפו את הקליפס חזרה. הצד הכחול של הכבל צריך לפנות לכיוון פורטי ה-USB והאת'רנט.

-
החזירו את ה-Grove Base Hat למקומו.
תכנות המצלמה
כעת ניתן לתכנת את ה-Raspberry Pi לשימוש במצלמה באמצעות ספריית Python בשם PiCamera.
משימה - הפעלת מצב מצלמה ישן
לצערנו, עם שחרור מערכת ההפעלה Raspberry Pi OS Bullseye, תוכנת המצלמה שהגיעה עם המערכת השתנתה, ולכן כברירת מחדל PiCamera לא עובדת. ישנו תחליף בפיתוח, בשם PiCamera2, אך הוא עדיין לא מוכן לשימוש.
בינתיים, ניתן להגדיר את ה-Pi למצב מצלמה ישן כדי לאפשר ל-PiCamera לעבוד. שקע המצלמה גם מושבת כברירת מחדל, אך הפעלת תוכנת המצלמה הישנה תפעיל אותו אוטומטית.
-
הפעילו את ה-Pi והמתינו עד שיסיים את תהליך האתחול.
-
הפעילו את VS Code, או ישירות על ה-Pi, או באמצעות תוסף Remote SSH.
-
הריצו את הפקודות הבאות מהטרמינל:
sudo raspi-config nonint do_legacy 0 sudo rebootפקודות אלו יפעילו הגדרה שתאפשר את תוכנת המצלמה הישנה, ואז יאתחלו את ה-Pi כדי שההגדרה תיכנס לתוקף.
-
המתינו שה-Pi יאתחל מחדש, ואז הפעילו מחדש את VS Code.
משימה - תכנות המצלמה
תכנתו את המכשיר.
-
מהטרמינל, צרו תיקייה חדשה בספריית הבית של המשתמש
piבשםfruit-quality-detector. צרו קובץ בתיקייה זו בשםapp.py. -
פתחו את התיקייה הזו ב-VS Code.
-
כדי לעבוד עם המצלמה, ניתן להשתמש בספריית Python בשם PiCamera. התקינו את חבילת ה-Pip שלה עם הפקודה הבאה:
pip3 install picamera -
הוסיפו את הקוד הבא לקובץ
app.pyשלכם:import io import time from picamera import PiCameraקוד זה מייבא כמה ספריות נחוצות, כולל ספריית
PiCamera. -
הוסיפו את הקוד הבא מתחת לזה כדי לאתחל את המצלמה:
camera = PiCamera() camera.resolution = (640, 480) camera.rotation = 0 time.sleep(2)קוד זה יוצר אובייקט PiCamera, מגדיר את הרזולוציה ל-640x480. למרות שרזולוציות גבוהות יותר נתמכות (עד 3280x2464), מסווג התמונות עובד על תמונות קטנות בהרבה (227x227), ולכן אין צורך לצלם ולשלוח תמונות גדולות יותר.
השורה
camera.rotation = 0מגדירה את סיבוב התמונה. כבל הסרט נכנס לתחתית המצלמה, אך אם המצלמה שלכם סובבה כדי להקל על הצבעתה על האובייקט שברצונכם לסווג, תוכלו לשנות שורה זו למספר מעלות הסיבוב.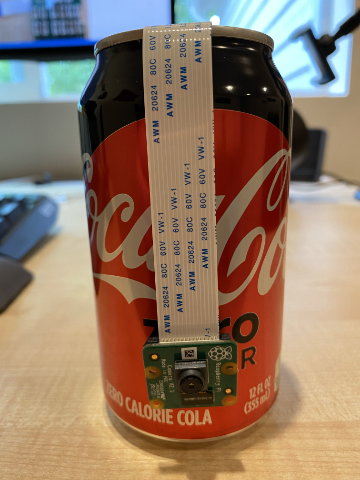
לדוגמה, אם תתלו את כבל הסרט מעל משהו כך שהוא יהיה בחלק העליון של המצלמה, הגדירו את הסיבוב ל-180:
camera.rotation = 180המצלמה לוקחת כמה שניות כדי להתחיל לפעול, ולכן השימוש ב-
time.sleep(2). -
הוסיפו את הקוד הבא מתחת לזה כדי לצלם את התמונה כנתונים בינאריים:
image = io.BytesIO() camera.capture(image, 'jpeg') image.seek(0)קוד זה יוצר אובייקט
BytesIOלאחסון נתונים בינאריים. התמונה נקראת מהמצלמה כקובץ JPEG ונשמרת באובייקט זה. לאובייקט זה יש מצביע מיקום כדי לדעת היכן הוא נמצא בנתונים כך שניתן להוסיף נתונים נוספים בסוף אם צריך, ולכן השורהimage.seek(0)מחזירה את המצביע להתחלה כדי שניתן יהיה לקרוא את כל הנתונים מאוחר יותר. -
מתחת לזה, הוסיפו את הקוד הבא כדי לשמור את התמונה לקובץ:
with open('image.jpg', 'wb') as image_file: image_file.write(image.read())קוד זה פותח קובץ בשם
image.jpgלכתיבה, ואז קורא את כל הנתונים מאובייקטBytesIOוכותב אותם לקובץ.💁 ניתן לצלם את התמונה ישירות לקובץ במקום לאובייקט
BytesIOעל ידי העברת שם הקובץ לקריאה שלcamera.capture. הסיבה לשימוש באובייקטBytesIOהיא כדי שבהמשך השיעור תוכלו לשלוח את התמונה למסווג התמונות שלכם. -
כוונו את המצלמה למשהו והריצו את הקוד הזה.
-
תמונה תצולם ותישמר כ-
image.jpgבתיקייה הנוכחית. תוכלו לראות קובץ זה בסייר של VS Code. בחרו את הקובץ כדי לצפות בתמונה. אם יש צורך בסיבוב, עדכנו את השורהcamera.rotation = 0בהתאם וצילמו תמונה נוספת.
💁 תוכלו למצוא את הקוד הזה בתיקייה code-camera/pi.
😀 תוכנית המצלמה שלכם הצליחה!
כתב ויתור:
מסמך זה תורגם באמצעות שירות תרגום מבוסס בינה מלאכותית Co-op Translator. למרות שאנו שואפים לדיוק, יש לקחת בחשבון שתרגומים אוטומטיים עשויים להכיל שגיאות או אי דיוקים. המסמך המקורי בשפתו המקורית צריך להיחשב כמקור סמכותי. עבור מידע קריטי, מומלץ להשתמש בתרגום מקצועי על ידי אדם. איננו נושאים באחריות לאי הבנות או לפרשנויות שגויות הנובעות משימוש בתרגום זה.