21 KiB
Capturer une image - Wio Terminal
Dans cette partie de la leçon, vous allez ajouter une caméra à votre Wio Terminal et capturer des images avec celle-ci.
Matériel
Le Wio Terminal a besoin d'une caméra.
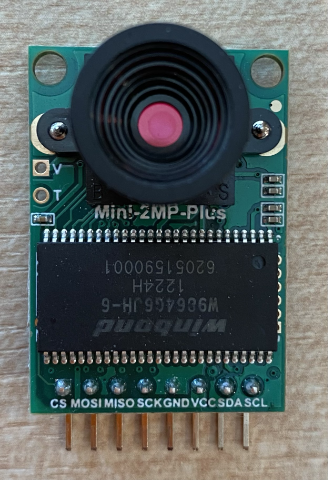
La caméra que vous utiliserez est une ArduCam Mini 2MP Plus. Il s'agit d'une caméra de 2 mégapixels basée sur le capteur d'image OV2640. Elle communique via une interface SPI pour capturer des images et utilise I2C pour configurer le capteur.
Connecter la caméra
L'ArduCam n'a pas de prise Grove, elle se connecte donc aux bus SPI et I2C via les broches GPIO du Wio Terminal.
Tâche - connecter la caméra
Connectez la caméra.
-
Les broches à la base de l'ArduCam doivent être connectées aux broches GPIO du Wio Terminal. Pour faciliter l'identification des broches, attachez l'autocollant des broches GPIO fourni avec le Wio Terminal autour des broches :

-
À l'aide de fils de connexion, effectuez les connexions suivantes :
Broche ArduCAM Broche Wio Terminal Description CS 24 (SPI_CS) Sélection de puce SPI MOSI 19 (SPI_MOSI) Sortie du contrôleur SPI, entrée du périphérique MISO 21 (SPI_MISO) Entrée du contrôleur SPI, sortie du périphérique SCK 23 (SPI_SCLK) Horloge série SPI GND 6 (GND) Masse - 0V VCC 4 (5V) Alimentation 5V SDA 3 (I2C1_SDA) Données série I2C SCL 5 (I2C1_SCL) Horloge série I2C 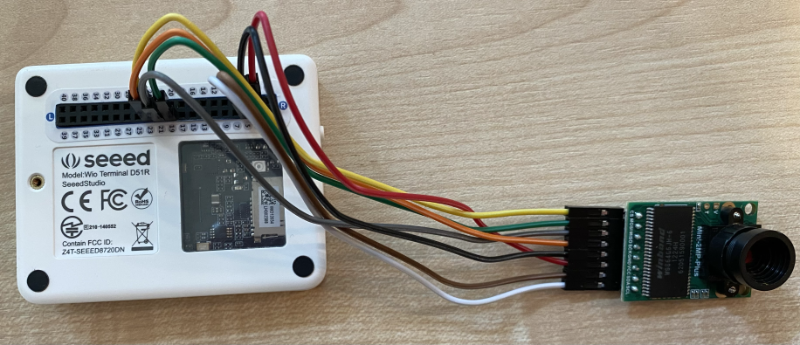
Les connexions GND et VCC fournissent une alimentation de 5V à l'ArduCam. Elle fonctionne à 5V, contrairement aux capteurs Grove qui fonctionnent à 3V. Cette alimentation provient directement de la connexion USB-C qui alimente l'appareil.
💁 Pour la connexion SPI, les étiquettes des broches sur l'ArduCam et les noms des broches du Wio Terminal utilisés dans le code utilisent encore l'ancienne convention de nommage. Les instructions de cette leçon utiliseront la nouvelle convention de nommage, sauf lorsque les noms des broches sont utilisés dans le code.
-
Vous pouvez maintenant connecter le Wio Terminal à votre ordinateur.
Programmer l'appareil pour se connecter à la caméra
Le Wio Terminal peut maintenant être programmé pour utiliser la caméra ArduCAM connectée.
Tâche - programmer l'appareil pour se connecter à la caméra
-
Créez un nouveau projet Wio Terminal avec PlatformIO. Appelez ce projet
fruit-quality-detector. Ajoutez du code dans la fonctionsetuppour configurer le port série. -
Ajoutez du code pour se connecter au WiFi, avec vos identifiants WiFi dans un fichier appelé
config.h. N'oubliez pas d'ajouter les bibliothèques nécessaires dans le fichierplatformio.ini. -
La bibliothèque ArduCam n'est pas disponible en tant que bibliothèque Arduino installable depuis le fichier
platformio.ini. Elle devra être installée depuis son dépôt GitHub. Vous pouvez l'obtenir en :- Clonant le dépôt depuis https://github.com/ArduCAM/Arduino.git
- Accédant au dépôt sur GitHub à github.com/ArduCAM/Arduino et en téléchargeant le code en tant que fichier zip depuis le bouton Code
-
Vous n'avez besoin que du dossier
ArduCAMde ce code. Copiez l'intégralité du dossier dans le dossierlibde votre projet.⚠️ Le dossier entier doit être copié, de sorte que le code soit dans
lib/ArduCam. Ne copiez pas simplement le contenu du dossierArduCamdans le dossierlib, copiez tout le dossier. -
Le code de la bibliothèque ArduCam fonctionne pour plusieurs types de caméras. Le type de caméra que vous souhaitez utiliser est configuré à l'aide de drapeaux du compilateur - cela permet de garder la bibliothèque construite aussi petite que possible en supprimant le code pour les caméras que vous n'utilisez pas. Pour configurer la bibliothèque pour la caméra OV2640, ajoutez ce qui suit à la fin du fichier
platformio.ini:build_flags = -DARDUCAM_SHIELD_V2 -DOV2640_CAMCela définit 2 drapeaux du compilateur :
ARDUCAM_SHIELD_V2pour indiquer à la bibliothèque que la caméra est sur une carte Arduino, appelée un shield.OV2640_CAMpour indiquer à la bibliothèque d'inclure uniquement le code pour la caméra OV2640.
-
Ajoutez un fichier d'en-tête dans le dossier
srcappelécamera.h. Ce fichier contiendra le code pour communiquer avec la caméra. Ajoutez le code suivant à ce fichier :#pragma once #include <ArduCAM.h> #include <Wire.h> class Camera { public: Camera(int format, int image_size) : _arducam(OV2640, PIN_SPI_SS) { _format = format; _image_size = image_size; } bool init() { // Reset the CPLD _arducam.write_reg(0x07, 0x80); delay(100); _arducam.write_reg(0x07, 0x00); delay(100); // Check if the ArduCAM SPI bus is OK _arducam.write_reg(ARDUCHIP_TEST1, 0x55); if (_arducam.read_reg(ARDUCHIP_TEST1) != 0x55) { return false; } // Change MCU mode _arducam.set_mode(MCU2LCD_MODE); uint8_t vid, pid; // Check if the camera module type is OV2640 _arducam.wrSensorReg8_8(0xff, 0x01); _arducam.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid); _arducam.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid); if ((vid != 0x26) && ((pid != 0x41) || (pid != 0x42))) { return false; } _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); _arducam.OV2640_set_Light_Mode(Auto); _arducam.OV2640_set_Special_effects(Normal); delay(1000); return true; } void startCapture() { _arducam.flush_fifo(); _arducam.clear_fifo_flag(); _arducam.start_capture(); } bool captureReady() { return _arducam.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK); } bool readImageToBuffer(byte **buffer, uint32_t &buffer_length) { if (!captureReady()) return false; // Get the image file length uint32_t length = _arducam.read_fifo_length(); buffer_length = length; if (length >= MAX_FIFO_SIZE) { return false; } if (length == 0) { return false; } // create the buffer byte *buf = new byte[length]; uint8_t temp = 0, temp_last = 0; int i = 0; uint32_t buffer_pos = 0; bool is_header = false; _arducam.CS_LOW(); _arducam.set_fifo_burst(); while (length--) { temp_last = temp; temp = SPI.transfer(0x00); //Read JPEG data from FIFO if ((temp == 0xD9) && (temp_last == 0xFF)) //If find the end ,break while, { buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_HIGH(); } if (is_header == true) { //Write image data to buffer if not full if (i < 256) { buf[buffer_pos] = temp; buffer_pos++; i++; } else { _arducam.CS_HIGH(); i = 0; buf[buffer_pos] = temp; buffer_pos++; i++; _arducam.CS_LOW(); _arducam.set_fifo_burst(); } } else if ((temp == 0xD8) & (temp_last == 0xFF)) { is_header = true; buf[buffer_pos] = temp_last; buffer_pos++; i++; buf[buffer_pos] = temp; buffer_pos++; i++; } } _arducam.clear_fifo_flag(); _arducam.set_format(_format); _arducam.InitCAM(); _arducam.OV2640_set_JPEG_size(_image_size); // return the buffer *buffer = buf; } private: ArduCAM _arducam; int _format; int _image_size; };Il s'agit d'un code de bas niveau qui configure la caméra à l'aide des bibliothèques ArduCam et extrait les images lorsque nécessaire via le bus SPI. Ce code est très spécifique à l'ArduCam, vous n'avez donc pas besoin de vous soucier de son fonctionnement pour le moment.
-
Dans
main.cpp, ajoutez le code suivant sous les autres déclarationsincludepour inclure ce nouveau fichier et créer une instance de la classe caméra :#include "camera.h" Camera camera = Camera(JPEG, OV2640_640x480);Cela crée une
Cameraqui enregistre les images au format JPEG avec une résolution de 640 par 480. Bien que des résolutions plus élevées soient prises en charge (jusqu'à 3280x2464), le classificateur d'images fonctionne sur des images beaucoup plus petites (227x227), il n'est donc pas nécessaire de capturer et d'envoyer des images plus grandes. -
Ajoutez le code suivant en dessous pour définir une fonction permettant de configurer la caméra :
void setupCamera() { pinMode(PIN_SPI_SS, OUTPUT); digitalWrite(PIN_SPI_SS, HIGH); Wire.begin(); SPI.begin(); if (!camera.init()) { Serial.println("Error setting up the camera!"); } }Cette fonction
setupCameracommence par configurer la broche de sélection de puce SPI (PIN_SPI_SS) comme étant haute, faisant du Wio Terminal le contrôleur SPI. Elle démarre ensuite les bus I2C et SPI. Enfin, elle initialise la classe caméra, ce qui configure les paramètres du capteur de la caméra et s'assure que tout est correctement câblé. -
Appelez cette fonction à la fin de la fonction
setup:setupCamera(); -
Compilez et téléversez ce code, puis vérifiez la sortie du moniteur série. Si vous voyez
Error setting up the camera!, vérifiez le câblage pour vous assurer que tous les fils connectent les bonnes broches sur l'ArduCam aux bonnes broches GPIO sur le Wio Terminal, et que tous les fils de connexion sont correctement insérés.
Capturer une image
Le Wio Terminal peut maintenant être programmé pour capturer une image lorsqu'un bouton est pressé.
Tâche - capturer une image
-
Les microcontrôleurs exécutent votre code en continu, il n'est donc pas facile de déclencher une action comme prendre une photo sans réagir à un capteur. Le Wio Terminal dispose de boutons, la caméra peut donc être configurée pour être déclenchée par l'un de ces boutons. Ajoutez le code suivant à la fin de la fonction
setuppour configurer le bouton C (l'un des trois boutons sur le dessus, celui le plus proche de l'interrupteur d'alimentation).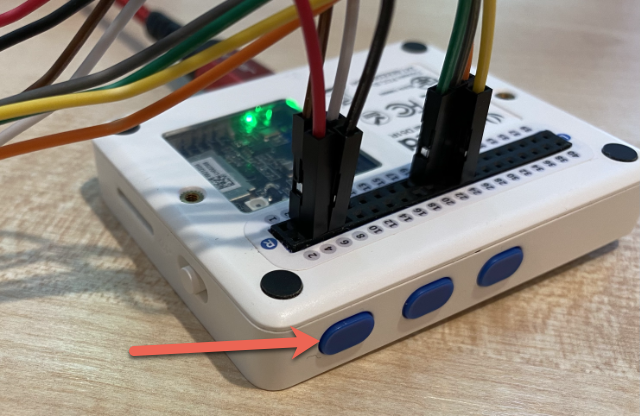
pinMode(WIO_KEY_C, INPUT_PULLUP);Le mode
INPUT_PULLUPinverse essentiellement une entrée. Par exemple, normalement un bouton enverrait un signal bas lorsqu'il n'est pas pressé, et un signal haut lorsqu'il est pressé. Lorsqu'il est configuré enINPUT_PULLUP, il envoie un signal haut lorsqu'il n'est pas pressé, et un signal bas lorsqu'il est pressé. -
Ajoutez une fonction vide pour répondre à l'appui sur le bouton avant la fonction
loop:void buttonPressed() { } -
Appelez cette fonction dans la méthode
looplorsque le bouton est pressé :void loop() { if (digitalRead(WIO_KEY_C) == LOW) { buttonPressed(); delay(2000); } delay(200); }Cette clé vérifie si le bouton est pressé. Si c'est le cas, la fonction
buttonPressedest appelée, et la boucle est retardée de 2 secondes. Cela permet de laisser le temps au bouton d'être relâché pour qu'un appui long ne soit pas enregistré deux fois.💁 Le bouton sur le Wio Terminal est configuré en
INPUT_PULLUP, il envoie donc un signal haut lorsqu'il n'est pas pressé, et un signal bas lorsqu'il est pressé. -
Ajoutez le code suivant à la fonction
buttonPressed:camera.startCapture(); while (!camera.captureReady()) delay(100); Serial.println("Image captured"); byte *buffer; uint32_t length; if (camera.readImageToBuffer(&buffer, length)) { Serial.print("Image read to buffer with length "); Serial.println(length); delete(buffer); }Ce code commence la capture de la caméra en appelant
startCapture. Le matériel de la caméra ne fonctionne pas en renvoyant les données lorsque vous les demandez, à la place, vous envoyez une instruction pour commencer la capture, et la caméra travaille en arrière-plan pour capturer l'image, la convertir en JPEG, et la stocker dans un tampon local sur la caméra elle-même. L'appelcaptureReadyvérifie ensuite si la capture de l'image est terminée.Une fois la capture terminée, les données de l'image sont copiées du tampon de la caméra dans un tampon local (tableau d'octets) avec l'appel
readImageToBuffer. La longueur du tampon est ensuite envoyée au moniteur série. -
Compilez et téléversez ce code, puis vérifiez la sortie sur le moniteur série. Chaque fois que vous appuyez sur le bouton C, une image sera capturée et vous verrez la taille de l'image envoyée au moniteur série.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 9224 Image captured Image read to buffer with length 11272Les différentes images auront des tailles différentes. Elles sont compressées en JPEG et la taille d'un fichier JPEG pour une résolution donnée dépend de ce qui se trouve dans l'image.
💁 Vous pouvez trouver ce code dans le dossier code-camera/wio-terminal.
😀 Vous avez réussi à capturer des images avec votre Wio Terminal.
Optionnel - vérifier les images de la caméra à l'aide d'une carte SD
Le moyen le plus simple de voir les images capturées par la caméra est de les écrire sur une carte SD dans le Wio Terminal, puis de les visualiser sur votre ordinateur. Effectuez cette étape si vous avez une carte microSD de rechange et un lecteur de carte microSD sur votre ordinateur, ou un adaptateur.
Le Wio Terminal ne prend en charge que les cartes microSD d'une capacité maximale de 16 Go. Si vous avez une carte SD plus grande, elle ne fonctionnera pas.
Tâche - vérifier les images de la caméra à l'aide d'une carte SD
-
Formatez une carte microSD en FAT32 ou exFAT à l'aide des applications pertinentes sur votre ordinateur (Utilitaire de disque sur macOS, Explorateur de fichiers sur Windows, ou des outils en ligne de commande sous Linux).
-
Insérez la carte microSD dans le lecteur juste en dessous de l'interrupteur d'alimentation. Assurez-vous qu'elle est complètement insérée jusqu'à ce qu'elle s'enclenche et reste en place. Vous devrez peut-être la pousser avec un ongle ou un outil fin.
-
Ajoutez les déclarations
includesuivantes en haut du fichiermain.cpp:#include "SD/Seeed_SD.h" #include <Seeed_FS.h> -
Ajoutez la fonction suivante avant la fonction
setup:void setupSDCard() { while (!SD.begin(SDCARD_SS_PIN, SDCARD_SPI)) { Serial.println("SD Card Error"); } }Cela configure la carte SD en utilisant le bus SPI.
-
Appelez cette fonction depuis la fonction
setup:setupSDCard(); -
Ajoutez le code suivant au-dessus de la fonction
buttonPressed:int fileNum = 1; void saveToSDCard(byte *buffer, uint32_t length) { char buff[16]; sprintf(buff, "%d.jpg", fileNum); fileNum++; File outFile = SD.open(buff, FILE_WRITE ); outFile.write(buffer, length); outFile.close(); Serial.print("Image written to file "); Serial.println(buff); }Cela définit une variable globale pour un compteur de fichiers. Ce compteur est utilisé pour les noms de fichiers d'image afin que plusieurs images puissent être capturées avec des noms de fichiers incrémentés -
1.jpg,2.jpg, etc.Ensuite, la fonction
saveToSDCardest définie. Elle prend un tampon de données en octets et la longueur du tampon. Un nom de fichier est créé en utilisant le compteur de fichiers, et le compteur est incrémenté pour le fichier suivant. Les données binaires du tampon sont ensuite écrites dans le fichier. -
Appelez la fonction
saveToSDCarddepuis la fonctionbuttonPressed. L'appel doit être avant que le tampon ne soit supprimé :Serial.print("Image read to buffer with length "); Serial.println(length); saveToSDCard(buffer, length); delete(buffer); -
Compilez et téléversez ce code, puis vérifiez la sortie sur le moniteur série. Chaque fois que vous appuyez sur le bouton C, une image sera capturée et enregistrée sur la carte SD.
Connecting to WiFi.. Connected! Image captured Image read to buffer with length 16392 Image written to file 1.jpg Image captured Image read to buffer with length 14344 Image written to file 2.jpg -
Éteignez le Wio Terminal et éjectez la carte microSD en la poussant légèrement pour la libérer. Vous devrez peut-être utiliser un outil fin pour cela. Insérez la carte microSD dans votre ordinateur pour visualiser les images.

💁 Il peut falloir quelques images pour que la balance des blancs de la caméra s'ajuste. Vous le remarquerez en fonction de la couleur des images capturées, les premières peuvent sembler décolorées. Vous pouvez toujours contourner cela en modifiant le code pour capturer quelques images qui sont ignorées dans la fonction
setup.
Avertissement :
Ce document a été traduit à l'aide du service de traduction automatique Co-op Translator. Bien que nous nous efforcions d'assurer l'exactitude, veuillez noter que les traductions automatisées peuvent contenir des erreurs ou des inexactitudes. Le document original dans sa langue d'origine doit être considéré comme la source faisant autorité. Pour des informations critiques, il est recommandé de recourir à une traduction professionnelle réalisée par un humain. Nous déclinons toute responsabilité en cas de malentendus ou d'interprétations erronées résultant de l'utilisation de cette traduction.