6.7 KiB
تشخیص نزدیکی - Wio Terminal
در این بخش از درس، شما یک حسگر نزدیکی به Wio Terminal خود اضافه میکنید و فاصله را از آن میخوانید.
سختافزار
Wio Terminal به یک حسگر نزدیکی نیاز دارد.
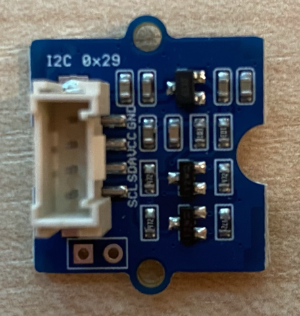
حسگری که استفاده میکنید یک حسگر فاصله Grove Time of Flight است. این حسگر از یک ماژول اندازهگیری لیزری برای تشخیص فاصله استفاده میکند. این حسگر دارای محدودهای از 10 میلیمتر تا 2000 میلیمتر (1 سانتیمتر - 2 متر) است و مقادیر را در این محدوده با دقت نسبتاً خوبی گزارش میدهد. فاصلههای بالای 1000 میلیمتر به صورت 8109 میلیمتر گزارش میشوند.
محدودهیاب لیزری در پشت حسگر قرار دارد، در سمت مخالف سوکت Grove.
این یک سوکت I
C است.
اتصال حسگر Time of Flight
حسگر Grove Time of Flight میتواند به Wio Terminal متصل شود.
وظیفه - اتصال حسگر Time of Flight
حسگر Time of Flight را متصل کنید.
-
یک سر کابل Grove را به سوکت روی حسگر Time of Flight وارد کنید. این کابل فقط از یک جهت وارد میشود.
-
با قطع اتصال Wio Terminal از کامپیوتر یا منبع تغذیه دیگر، سر دیگر کابل Grove را به سوکت Grove سمت چپ Wio Terminal متصل کنید. این سوکت نزدیکترین سوکت به دکمه پاور است. این یک سوکت ترکیبی دیجیتال و I
C است.
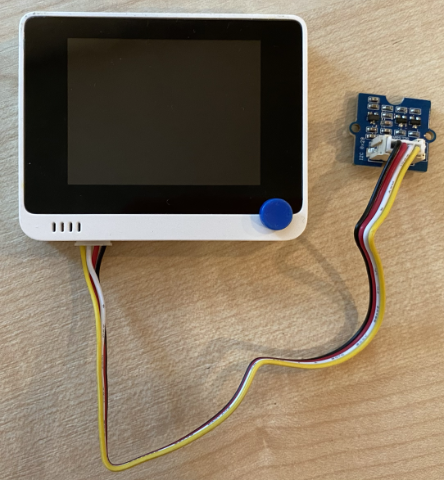
- اکنون میتوانید Wio Terminal را به کامپیوتر خود متصل کنید.
برنامهنویسی حسگر Time of Flight
اکنون میتوانید Wio Terminal را برای استفاده از حسگر Time of Flight متصل شده برنامهنویسی کنید.
وظیفه - برنامهنویسی حسگر Time of Flight
-
یک پروژه جدید Wio Terminal با استفاده از PlatformIO ایجاد کنید. این پروژه را
distance-sensorبنامید. کدی در تابعsetupاضافه کنید تا پورت سریال را پیکربندی کند. -
یک وابستگی کتابخانه برای کتابخانه حسگر فاصله Seeed Grove Time of Flight به فایل
platformio.iniپروژه اضافه کنید:lib_deps = seeed-studio/Grove Ranging sensor - VL53L0X @ ^1.1.1 -
در
main.cpp، کد زیر را زیر دستورات موجودincludeاضافه کنید تا یک نمونه از کلاسSeeed_vl53l0xبرای تعامل با حسگر Time of Flight اعلام کنید:#include "Seeed_vl53l0x.h" Seeed_vl53l0x VL53L0X; -
کد زیر را به انتهای تابع
setupاضافه کنید تا حسگر را مقداردهی اولیه کنید:VL53L0X.VL53L0X_common_init(); VL53L0X.VL53L0X_high_accuracy_ranging_init(); -
در تابع
loop، یک مقدار از حسگر بخوانید:VL53L0X_RangingMeasurementData_t RangingMeasurementData; memset(&RangingMeasurementData, 0, sizeof(VL53L0X_RangingMeasurementData_t)); VL53L0X.PerformSingleRangingMeasurement(&RangingMeasurementData);این کد یک ساختار داده را برای خواندن دادهها مقداردهی اولیه میکند، سپس آن را به متد
PerformSingleRangingMeasurementمیفرستد تا با اندازهگیری فاصله پر شود. -
زیر این کد، مقدار اندازهگیری فاصله را بنویسید، سپس به مدت 1 ثانیه تأخیر ایجاد کنید:
Serial.print("Distance = "); Serial.print(RangingMeasurementData.RangeMilliMeter); Serial.println(" mm"); delay(1000); -
این کد را بسازید، آپلود کنید و اجرا کنید. شما میتوانید اندازهگیریهای فاصله را با مانیتور سریال مشاهده کنید. اشیاء را نزدیک حسگر قرار دهید و اندازهگیری فاصله را مشاهده خواهید کرد:
Distance = 29 mm Distance = 28 mm Distance = 30 mm Distance = 151 mmمحدودهیاب در پشت حسگر قرار دارد، بنابراین هنگام اندازهگیری فاصله از سمت درست استفاده کنید.

💁 میتوانید این کد را در پوشه code-proximity/wio-terminal پیدا کنید.
😀 برنامه حسگر نزدیکی شما موفقیتآمیز بود!
سلب مسئولیت:
این سند با استفاده از سرویس ترجمه هوش مصنوعی Co-op Translator ترجمه شده است. در حالی که ما تلاش میکنیم دقت را حفظ کنیم، لطفاً توجه داشته باشید که ترجمههای خودکار ممکن است شامل خطاها یا نادرستیها باشند. سند اصلی به زبان اصلی آن باید به عنوان منبع معتبر در نظر گرفته شود. برای اطلاعات حساس، ترجمه حرفهای انسانی توصیه میشود. ما مسئولیتی در قبال سوء تفاهمها یا تفسیرهای نادرست ناشی از استفاده از این ترجمه نداریم.