5.4 KiB
Nähe erkennen - Virtuelle IoT-Hardware
In diesem Abschnitt der Lektion fügen Sie Ihrem virtuellen IoT-Gerät einen Näherungssensor hinzu und lesen die Entfernung davon ab.
Hardware
Das virtuelle IoT-Gerät wird einen simulierten Entfernungssensor verwenden.
Bei einem physischen IoT-Gerät würden Sie einen Sensor mit einem Laser-Messmodul verwenden, um Entfernungen zu erkennen.
Entfernungssensor zu CounterFit hinzufügen
Um einen virtuellen Entfernungssensor zu verwenden, müssen Sie einen in der CounterFit-App hinzufügen.
Aufgabe - Entfernungssensor zu CounterFit hinzufügen
Fügen Sie den Entfernungssensor zur CounterFit-App hinzu.
-
Öffnen Sie den Code
fruit-quality-detectorin VS Code und stellen Sie sicher, dass die virtuelle Umgebung aktiviert ist. -
Installieren Sie ein zusätzliches Pip-Paket, um einen CounterFit-Shim zu installieren, der mit Entfernungssensoren kommunizieren kann, indem er das rpi-vl53l0x Pip-Paket simuliert, ein Python-Paket, das mit einem VL53L0X Time-of-Flight Entfernungssensor interagiert. Stellen Sie sicher, dass Sie dies von einem Terminal mit aktivierter virtueller Umgebung aus installieren.
pip install counterfit-shims-rpi-vl53l0x -
Stellen Sie sicher, dass die CounterFit-Web-App läuft.
-
Erstellen Sie einen Entfernungssensor:
-
Im Feld Create sensor im Bereich Sensors öffnen Sie das Dropdown-Menü Sensor type und wählen Distance.
-
Lassen Sie die Units auf
Millimeter. -
Dieser Sensor ist ein I²C-Sensor, daher setzen Sie die Adresse auf
0x29. Wenn Sie einen physischen VL53L0X-Sensor verwenden würden, wäre diese Adresse festgelegt. -
Wählen Sie die Schaltfläche Add, um den Entfernungssensor zu erstellen.
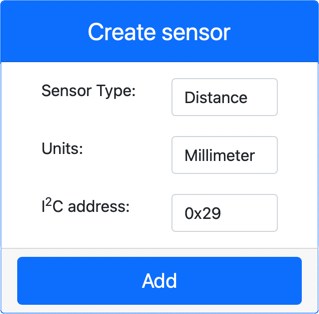
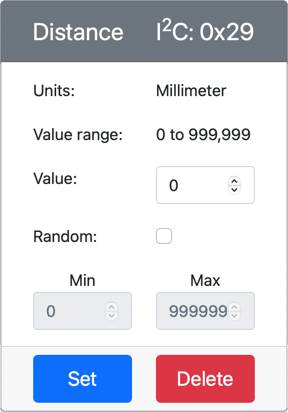
Der Entfernungssensor wird erstellt und erscheint in der Sensorliste.
-
Den Entfernungssensor programmieren
Das virtuelle IoT-Gerät kann jetzt programmiert werden, um den simulierten Entfernungssensor zu verwenden.
Aufgabe - Time-of-Flight-Sensor programmieren
-
Erstellen Sie eine neue Datei im Projekt
fruit-quality-detectormit dem Namendistance-sensor.py.💁 Eine einfache Möglichkeit, mehrere IoT-Geräte zu simulieren, besteht darin, jedes in einer separaten Python-Datei zu programmieren und sie dann gleichzeitig auszuführen.
-
Starten Sie eine Verbindung zu CounterFit mit folgendem Code:
from counterfit_connection import CounterFitConnection CounterFitConnection.init('127.0.0.1', 5000) -
Fügen Sie den folgenden Code darunter hinzu:
import time from counterfit_shims_rpi_vl53l0x.vl53l0x import VL53L0XDieser Code importiert die Sensorbibliothek-Shim für den VL53L0X Time-of-Flight-Sensor.
-
Fügen Sie darunter den folgenden Code hinzu, um auf den Sensor zuzugreifen:
distance_sensor = VL53L0X() distance_sensor.begin()Dieser Code deklariert einen Entfernungssensor und startet ihn anschließend.
-
Fügen Sie schließlich eine Endlosschleife hinzu, um Entfernungen zu lesen:
while True: distance_sensor.wait_ready() print(f'Distance = {distance_sensor.get_distance()} mm') time.sleep(1)Dieser Code wartet darauf, dass ein Wert vom Sensor bereit ist, und gibt ihn dann in der Konsole aus.
-
Führen Sie diesen Code aus.
💁 Vergessen Sie nicht, dass diese Datei
distance-sensor.pyheißt! Stellen Sie sicher, dass Sie sie mit Python ausführen und nicht mitapp.py. -
Sie werden Entfernungswerte in der Konsole sehen. Ändern Sie den Wert in CounterFit, um zu sehen, wie sich dieser Wert ändert, oder verwenden Sie zufällige Werte.
(.venv) ➜ fruit-quality-detector python distance-sensor.py Distance = 37 mm Distance = 42 mm Distance = 29 mm
💁 Sie finden diesen Code im Ordner code-proximity/virtual-iot-device.
😀 Ihr Programm für den Näherungssensor war ein Erfolg!
Haftungsausschluss:
Dieses Dokument wurde mit dem KI-Übersetzungsdienst Co-op Translator übersetzt. Obwohl wir uns um Genauigkeit bemühen, beachten Sie bitte, dass automatisierte Übersetzungen Fehler oder Ungenauigkeiten enthalten können. Das Originaldokument in seiner ursprünglichen Sprache sollte als maßgebliche Quelle betrachtet werden. Für kritische Informationen wird eine professionelle menschliche Übersetzung empfohlen. Wir übernehmen keine Haftung für Missverständnisse oder Fehlinterpretationen, die sich aus der Nutzung dieser Übersetzung ergeben.