26 KiB
P4-Node优先级算法
前言
在上一篇文档中,我们过了一遍node筛选算法:
按调度规则设计,对筛选出的node,选择优先级最高的作为最终的fit node。那么本篇承接上一篇,进入下一步,看一看node优先级排序的过程。
Tips: 本篇篇幅较长,因调度优选算法较为复杂,但请耐心结合本篇阅读源码,多看几次,一定会有收获。
正文
1. 优先级函数
1.1 优先级函数入口
同上一篇,回到pkg/scheduler/core/generic_scheduler.go中的Schedule()函数,pkg/scheduler/core/generic_scheduler.go:184:
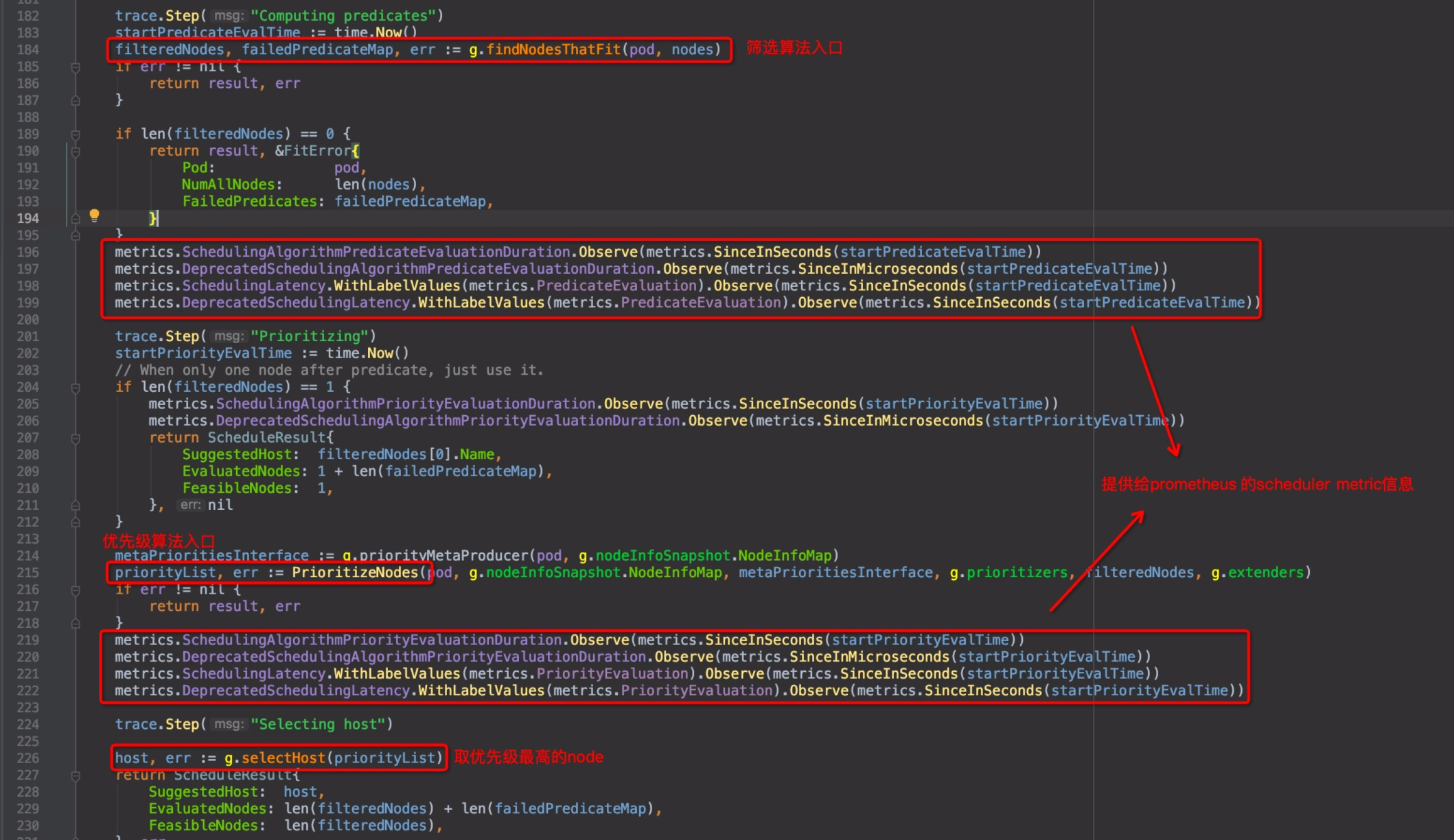
截图中有几处标注,metric相关的几行,是收集metric信息,用以提供给prometheus使用的,kubernetes的几个核心组件都有这个功能,以后如果读prometheus的源码,这个单独拎出来再讲。直接进入优先级函数PrioritizeNodes()内部pkg/scheduler/core/generic_scheduler.go:215
1.2 优先级函数概括说明
pkg/scheduler/core/generic_scheduler.go:645 PrioritizeNodes(),代码块较长,就不贴了.
在此函数上方的注释可以得知,这个函数的工作逻辑:
-
1.列出所有的优先级计算维度的方法,每个维度的方法返回该维度的得分,每个维度都有内部定义的weight权重,以及得分score,score取值范围在[0-10之间],该维度的最终得分为 (score * weight),得分越高越好
-
2.列出所有参与运算的node
-
3.循环对每一个node分别进行1中所有维度方法项计算,最后将该node的所有计算维度得分汇总
这里有一个重要的结构体始终贯穿整个函数栈,特别指出:
// HostPriority represents the priority of scheduling to a particular host, higher priority is better.
type HostPriority struct {
// Name of the host
Host string
// Score associated with the host
Score int
}
两个重要变量
// pkg/scheduler/core/generic_scheduler.go:678
// 注意,这里的results是个双层array的结构,统计的是各维度各node的分别得分,即[][]HostPriority类型,用伪代码抽象一下:
/*
result = [
// 维度1,各node的得分
[{node-a: 1},{node-b: 2},{node-c: 3}...],
// 维度2,各node的得分
[{node-a: 3},{node-b: 1},{node-c: 2}...],
...
]
*/
results := make([]schedulerapi.HostPriorityList, len(priorityConfigs), len(priorityConfigs))
// pkg/scheduler/core/generic_scheduler.go:738
// 这里的result是[]HostPriority类型,即汇总所有维度之后每个node的最终得分
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
1.3 优先级函数分段说明
1.3.1 Function(DEPRECATED)
pkg/scheduler/core/generic_scheduler.go:682
// DEPRECATED: we can remove this when all priorityConfigs implement the
// Map-Reduce pattern.
for i := range priorityConfigs {
if priorityConfigs[i].Function != nil {
wg.Add(1)
go func(index int) {
defer wg.Done()
var err error
results[index], err = priorityConfigs[index].Function(pod, nodeNameToInfo, nodes)
if err != nil {
appendError(err)
}
}(i)
} else {
results[i] = make(schedulerapi.HostPriorityList, len(nodes))
}
}
注释中说明这种直接计算方法(priorityConfigs[i].Function)是传统模式,已经DEPRECATED掉了,当前版本实际上只有一个维度(pod亲和性)采取了这种方法,取而代之的是Map-Reduce模式的计算方法,参见后方。Function运算的方式,随后会以pod亲和性这个维度的实例代码来说明。
1.3.2 Map-Reduce Function
pkg/scheduler/core/generic_scheduler.go:698
workqueue.ParallelizeUntil(context.TODO(), 16, len(nodes), func(index int) {
nodeInfo := nodeNameToInfo[nodes[index].Name]
for i := range priorityConfigs {
if priorityConfigs[i].Function != nil {
continue
}
var err error
results[i][index], err = priorityConfigs[i].Map(pod, meta, nodeInfo)
if err != nil {
appendError(err)
results[i][index].Host = nodes[index].Name
}
}
})
for i := range priorityConfigs {
if priorityConfigs[i].Reduce == nil {
continue
}
wg.Add(1)
go func(index int) {
defer wg.Done()
if err := priorityConfigs[index].Reduce(pod, meta, nodeNameToInfo, results[index]); err != nil {
appendError(err)
}
if klog.V(10) {
for _, hostPriority := range results[index] {
klog.Infof("%v -> %v: %v, Score: (%d)", util.GetPodFullName(pod), hostPriority.Host, priorityConfigs[index].Name, hostPriority.Score)
}
}
}(i)
}
// Wait for all computations to be finished.
wg.Wait()
这里可以看出,若该维度未直接指定priorityConfigs[i].Function,则采取Map-Reduce模式.
引申:Map-Reduce是大数据里的思想,简单来说Map函数是对一组元素集上的每一个元素进行高度并行的运算,得到与元素
集对应(mapping关系)的结果集,Reduce函数则对结果集进行归纳运算而后返回需要的结果。
这里再次出现了上一篇中特别提到的workqueue.ParallelizeUntil()并行运算控制方法,同样以node为粒度,运行Map函数;而下方并行度不高的Reduce函数,则使用的sync模块才实现并发控制。符合Map-Reduce的思想。
没接触过Map-Reduce,但先不要被吓住,这里只是利用了这个思想,数据量并没有复杂到要拆分给多台机器分布式运算的级别。随后举一个使用Map-Reduce计算方法的维度的实例代码来说明。
2. 优先级计算维度
2.1 默认注册的计算维度
通过上面的内容,对优先级算法有了一个模糊的认知:统计节点的各计算维度得分的总和,分数越高优先级越高。那么默认的优先级计算维度分别有哪些呢?在前面的scheduler-框架篇中有讲过,调度算法全部位于pkg/scheduler/algorithm目录中,而pkg/scheduler/algorithmprovider内提供以工厂模式创建调度算法相关元素的方法,所以,我们直接来到pkg/scheduler/algorithmprovider/defaults/register_priorities.go文件内,所有默认的优先级计算维度的算法都在这里注册,篇幅有限,随便列举其中几个:
factory.RegisterPriorityFunction2(priorities.EqualPriority, core.EqualPriorityMap, nil, 1)
// Optional, cluster-autoscaler friendly priority function - give used nodes higher priority.
factory.RegisterPriorityFunction2(priorities.MostRequestedPriority, priorities.MostRequestedPriorityMap, nil, 1)
factory.RegisterPriorityFunction2(
priorities.RequestedToCapacityRatioPriority,
priorities.RequestedToCapacityRatioResourceAllocationPriorityDefault().PriorityMap,
nil,
1)
如果仔细看代码里的注释可以发现,个别factory函数虽然已经将计算维度注册,但实际上默认并没有启用它,例如ServiceSpreadingPriority这一项中的注释表明,它已经相当大程度被SelectorSpreadPriority取代了,保留它是为了兼容此前的版本。那么默认使用的计算维度有哪些呢?
2.2 默认使用的计算维度
默认使用的计算维度,在这个地方声明:
pkg/scheduler/algorithmprovider/defaults/defaults.go:108
func defaultPriorities() sets.String {
return sets.NewString(
priorities.SelectorSpreadPriority,
priorities.InterPodAffinityPriority,
priorities.LeastRequestedPriority,
priorities.BalancedResourceAllocation,
priorities.NodePreferAvoidPodsPriority,
priorities.NodeAffinityPriority,
priorities.TaintTolerationPriority,
priorities.ImageLocalityPriority,
)
}
2.3 新旧两种计算方式
在注册的每一个计算维度,都有专属的维度描述关键字,即factory方法的第一个参数(str类型)。不难发现,这里的每一个关键字,pkg/scheduler/algorithm/priorities目录内都有与其对应的文件,图中圈出了几个例子(灵魂画笔请原谅):
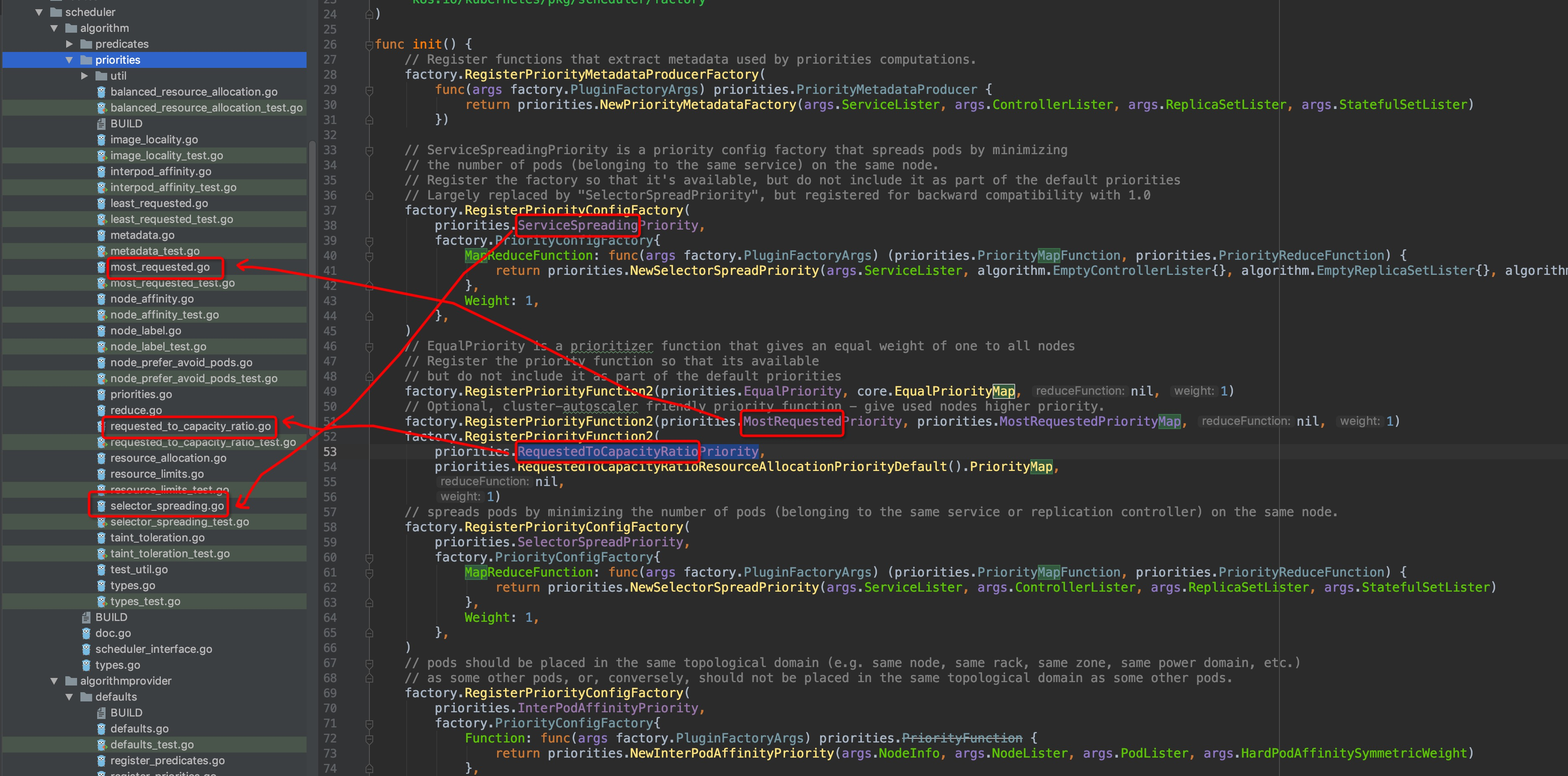
显而易见,维度计算的内容就在这些文件中,可以自行通过编辑器的跳转功能逐级查看进行验证.
通过这是factory方法可以看出,所有维度,默认的注册权重都是1,除了NodePreferAvoidPodsPriority这一项之外,它的weight值是10000,这一项是为了避免pod调度到node上,我们找到文件查看该方法的注释:
pkg/scheduler/algorithm/priorities/node_prefer_avoid_pods.go:31
// CalculateNodePreferAvoidPodsPriorityMap priorities nodes according to the node annotation
// "scheduler.alpha.kubernetes.io/preferAvoidPods".
func CalculateNodePreferAvoidPodsPriorityMap(pod *v1.Pod, meta interface{}, nodeInfo *schedulernodeinfo.NodeInfo) (schedulerapi.HostPriority, error) {
... // 省略
}
得知node可以通过annotation添加scheduler.alpha.kubernetes.io/preferAvoidPods指定来避免指定的pod调度到本身之上,因此此项优先级超高覆盖过其他的各计算维度。
如果ctrl + F 过滤一下map关键字,你会发现,仅有InterPodAffinityPriority这一项是没有map关键字的:
// pods should be placed in the same topological domain (e.g. same node, same rack, same zone, same power domain, etc.)
// as some other pods, or, conversely, should not be placed in the same topological domain as some other pods.
factory.RegisterPriorityConfigFactory(
priorities.InterPodAffinityPriority,
factory.PriorityConfigFactory{
Function: func(args factory.PluginFactoryArgs) priorities.PriorityFunction {
return priorities.NewInterPodAffinityPriority(args.NodeInfo, args.NodeLister, args.PodLister, args.HardPodAffinitySymmetricWeight)
},
Weight: 1,
},
)
这也印证了前面说的当前仅剩pod亲和性这一个维度在使用传统的Function,虽然已经被DEPRECATED掉了,传统的Function是直接计算出结果,Map-Reduce是将这个过程解耦拆成了两个步骤,且我们可以看到所有的factory函数,很多形参reduceFunction接收到的实参实际是是nil:
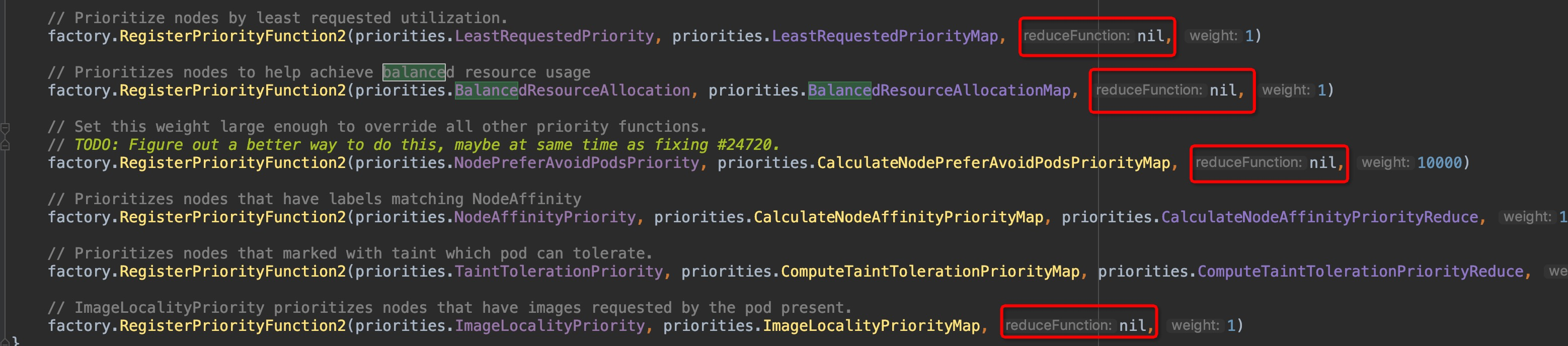
这就说明这些维度的计算工作在map函数里面已经执行完成了,不需要再执行reduce函数了。因此,传统的Function的计算过程同样值得参考,那么首先就来看看InterPodAffinityPriority维度是怎么计算的吧!
3. 传统计算Function
3.1 InterPodAffinityPriority
看代码之前,先来看一个标准的PodAffinity配置示例:
PodAffinity示例:
apiVersion: v1
kind: Pod
metadata:
name: pod-a
namespace: default
spec:
affinity:
podAffinity:
preferredDuringSchedulingIgnoredDuringExecution:
- podAffinityTerm:
weight: 100
labelSelector:
matchExpressions:
- key: like
operator: In
values:
- pod-b
# 拓扑层级,大多数是node层级,但其实还有zone/region等层级
topologyKey: kubernetes.io/hostname
podAntiAffinity:
preferredDuringSchedulingIgnoredDuringExecution:
- weight: 100
podAffinityTerm:
labelSelector:
matchExpressions:
- key: unlike
operator: In
values:
- pod-c
topologyKey: kubernetes.io/hostname
containers:
- name: test
image: gcr.io/google_containers/pause:2.0
yaml中的申明意图是: pod-a亲近pod-b,疏远pod-c,所以在这项计算维度里,如果node上运行着pod-b ,则该node加分,如果该node上运行着pod-c,则node减分。
来看代码,仔细读代码,你会发现示例中的几个层级的key: PreferredDuringSchedulingIgnoredDuringExecution,podAffinityTerm,labelSelector,topologyKey在代码中都会出现:
pkg/scheduler/algorithm/priorities/interpod_affinity.go:119:
func (ipa *InterPodAffinity) CalculateInterPodAffinityPriority(pod *v1.Pod, nodeNameToInfo map[string]*schedulernodeinfo.NodeInfo, nodes []*v1.Node) (schedulerapi.HostPriorityList, error) {
affinity := pod.Spec.Affinity
// 判断待调度pod是否存在亲和性约束
hasAffinityConstraints := affinity != nil && affinity.PodAffinity != nil
// 判断待调度是否pod存在反亲和性约束
hasAntiAffinityConstraints := affinity != nil && affinity.PodAntiAffinity != nil
... // 省略
// 根据node上正在运行的pod来计算node得分的函数,分为两个层面计算,两个层面都可以加减分:
// 1.待调度pod与现存pod的亲和性(软亲和性,因为待调度pod还未实际运行起来)
// 2.现存pod与待调度pod的亲和性(硬亲和性,因为待调度pod正在运行)
// 加减分操作由processTerm()方法进行计分,这个下面再讲
// 这里是pod级别,被下方node级别的processNode调用
processPod := func(existingPod *v1.Pod) error {
existingPodNode, err := ipa.info.GetNodeInfo(existingPod.Spec.NodeName)
if err != nil {
if apierrors.IsNotFound(err) {
klog.Errorf("Node not found, %v", existingPod.Spec.NodeName)
return nil
}
return err
}
existingPodAffinity := existingPod.Spec.Affinity
// 判断node上正在运行的pod是否与待调度的pod存在亲和性约束
existingHasAffinityConstraints := existingPodAffinity != nil && existingPodAffinity.PodAffinity != nil
// 判断node上正在运行的pod是否与待调度的pod存在反亲和性约束
existingHasAntiAffinityConstraints := existingPodAffinity != nil && existingPodAffinity.PodAntiAffinity != nil
if hasAffinityConstraints {
terms := affinity.PodAffinity.PreferredDuringSchedulingIgnoredDuringExecution
pm.processTerms(terms, pod, existingPod, existingPodNode, 1)
}
if hasAntiAffinityConstraints {
terms := affinity.PodAntiAffinity.PreferredDuringSchedulingIgnoredDuringExecution
pm.processTerms(terms, pod, existingPod, existingPodNode, -1)
}
if existingHasAffinityConstraints {
if ipa.hardPodAffinityWeight > 0 {
terms := existingPodAffinity.PodAffinity.RequiredDuringSchedulingIgnoredDuringExecution
for _, term := range terms {
pm.processTerm(&term, existingPod, pod, existingPodNode, float64(ipa.hardPodAffinityWeight))
}
}
terms := existingPodAffinity.PodAffinity.PreferredDuringSchedulingIgnoredDuringExecution
pm.processTerms(terms, existingPod, pod, existingPodNode, 1)
}
if existingHasAntiAffinityConstraints {
terms := existingPodAffinity.PodAntiAffinity.PreferredDuringSchedulingIgnoredDuringExecution
pm.processTerms(terms, existingPod, pod, existingPodNode, -1)
}
return nil
}
// 这里是node级别的,调用上方的processPod,被下方的并发控制函数调用,内部逻辑分支有两支:
// 1.pod指定了亲和性约束,那么node上每个现存的pod都要与待调度pod进行硬、软亲和性计算
// 2.pod未指定亲和性约束,那么仅需要对node上现存的已指定亲和性约束的pod,与待调度pod进行硬亲和性计算
processNode := func(i int) {
nodeInfo := nodeNameToInfo[allNodeNames[i]]
if nodeInfo.Node() != nil {
if hasAffinityConstraints || hasAntiAffinityConstraints {
for _, existingPod := range nodeInfo.Pods() {
if err := processPod(existingPod); err != nil {
pm.setError(err)
}
}
} else {
for _, existingPod := range nodeInfo.PodsWithAffinity() {
if err := processPod(existingPod); err != nil {
pm.setError(err)
}
}
}
}
}
// node级别并发
workqueue.ParallelizeUntil(context.TODO(), 16, len(allNodeNames), processNode)
... // 省略
// 计算此Pod亲和性维度的各node的得分
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
for _, node := range nodes {
fScore := float64(0)
if (maxCount - minCount) > 0 {
// 分母是maxCount - minCount,不直接使用maxCount做分母是因为maxCount可能为0,通过整除运算,控制node的最高得分为MaxPriority(默认10),最低位0
fScore = float64(schedulerapi.MaxPriority) * ((pm.counts[node.Name] - minCount) / (maxCount - minCount))
}
result = append(result, schedulerapi.HostPriority{Host: node.Name, Score: int(fScore)})
if klog.V(10) {
klog.Infof("%v -> %v: InterPodAffinityPriority, Score: (%d)", pod.Name, node.Name, int(fScore))
}
}
return result, nil
}
上面代码中的注释已经将CalculateInterPodAffinityPriority这个函数的工作模式介绍的比较清晰了,那么再看一看计分函数processTerm():
pkg/scheduler/algorithm/priorities/interpod_affinity.go:107 --> pkg/scheduler/algorithm/priorities/interpod_affinity.go:86
func (p *podAffinityPriorityMap) processTerm(term *v1.PodAffinityTerm, podDefiningAffinityTerm, podToCheck *v1.Pod, fixedNode *v1.Node, weight float64) {
namespaces := priorityutil.GetNamespacesFromPodAffinityTerm(podDefiningAffinityTerm, term)
selector, err := metav1.LabelSelectorAsSelector(term.LabelSelector)
if err != nil {
p.setError(err)
return
}
// 待调度pod和被检查pod存在亲和性则匹配,匹配且node与指定的term处于同一拓扑层级,则node加分
match := priorityutil.PodMatchesTermsNamespaceAndSelector(podToCheck, namespaces, selector)
if match {
func() {
p.Lock()
defer p.Unlock()
for _, node := range p.nodes {
// TopologyKey是拓扑逻辑层级,上面例子中的是kubernetes.io/hostname,kuernetes内建了几个层级
// 如failure-domain.beta.kubernetes.io/zone,kubernetes.io/hostname等,参考:
// https://kubernetes.io/docs/concepts/configuration/assign-pod-node/#inter-pod-affinity-and-anti-affinity
if priorityutil.NodesHaveSameTopologyKey(node, fixedNode, term.TopologyKey) {
p.counts[node.Name] += weight
}
}
}()
}
}
podAffinityPriority这个维度的算法到此就明了了
4. Map-Reduce计算方法
在pkg/scheduler/algorithmprovider/defaults/register_priorities.go:26中的init()函数内,找出所有在注册且默认被使用的,同时包含map方法和reduce方法的factory函数,一共有3个,我们挑其中之一为例作启发,其余的就不写在文章里了,可以自行阅读:
// pkg/scheduler/algorithmprovider/defaults/register_priorities.go:58
// spreads pods by minimizing the number of pods (belonging to the same service or replication controller) on the same node.
factory.RegisterPriorityConfigFactory(
priorities.SelectorSpreadPriority,
factory.PriorityConfigFactory{
MapReduceFunction: func(args factory.PluginFactoryArgs) (priorities.PriorityMapFunction, priorities.PriorityReduceFunction) {
return priorities.NewSelectorSpreadPriority(args.ServiceLister, args.ControllerLister, args.ReplicaSetLister, args.StatefulSetLister)
},
Weight: 1,
},
)
// pkg/scheduler/algorithmprovider/defaults/register_priorities.go:90
factory.RegisterPriorityFunction2(priorities.NodeAffinityPriority, priorities.CalculateNodeAffinityPriorityMap, priorities.CalculateNodeAffinityPriorityReduce, 1)
// pkg/scheduler/algorithmprovider/defaults/register_priorities.go:93
factory.RegisterPriorityFunction2(priorities.TaintTolerationPriority, priorities.ComputeTaintTolerationPriorityMap, priorities.ComputeTaintTolerationPriorityReduce, 1)
那就以第一个ServiceSpreadingPriority维度为例吧,名字直译为: 选择器均分优先级,注释中可以得知,这一项是为了保障属于同一个Service或replication controller的的pod,尽量分散开在不同的node里,保障高可用。
NewSelectorSpreadPriority()方法用来注册此维度的Map和Reduce函数,来看看其内容:
pkg/scheduler/algorithmprovider/defaults/register_priorities.go:62 NewSelectorSpreadPriority()----> pkg/scheduler/algorithm/priorities/selector_spreading.go:45
func NewSelectorSpreadPriority(
serviceLister algorithm.ServiceLister,
controllerLister algorithm.ControllerLister,
replicaSetLister algorithm.ReplicaSetLister,
statefulSetLister algorithm.StatefulSetLister) (PriorityMapFunction, PriorityReduceFunction) {
selectorSpread := &SelectorSpread{
serviceLister: serviceLister,
controllerLister: controllerLister,
replicaSetLister: replicaSetLister,
statefulSetLister: statefulSetLister,
}
return selectorSpread.CalculateSpreadPriorityMap, selectorSpread.CalculateSpreadPriorityReduce
}
注意这4个参数:serviceLister/replicaSetLister/statefulSetLister/controllerLister,与pod相关的四个上层抽象概念Service/RC/RS/StatefulSet都列出来了,返回的map函数是CalculateSpreadPriorityMap,reduce函数是CalculateSpreadPriorityReduce,分别看一看他们吧
4.1 Map函数
pkg/scheduler/algorithm/priorities/selector_spreading.go:66
func (s *SelectorSpread) CalculateSpreadPriorityMap(pod *v1.Pod, meta interface{}, nodeInfo *schedulernodeinfo.NodeInfo) (schedulerapi.HostPriority, error) {
var selectors []labels.Selector
node := nodeInfo.Node()
if node == nil {
return schedulerapi.HostPriority{}, fmt.Errorf("node not found")
}
priorityMeta, ok := meta.(*priorityMetadata)
if ok {
selectors = priorityMeta.podSelectors
} else {
selectors = getSelectors(pod, s.serviceLister, s.controllerLister, s.replicaSetLister, s.statefulSetLister)
}
if len(selectors) == 0 {
return schedulerapi.HostPriority{
Host: node.Name,
Score: int(0),
}, nil
}
count := countMatchingPods(pod.Namespace, selectors, nodeInfo)
return schedulerapi.HostPriority{
Host: node.Name,
Score: count,
}, nil
}
继续看countMatchingPods函数:
pkg/scheduler/algorithm/priorities/selector_spreading.go:187:
func countMatchingPods(namespace string, selectors []labels.Selector, nodeInfo *schedulernodeinfo.NodeInfo) int {
if nodeInfo.Pods() == nil || len(nodeInfo.Pods()) == 0 || len(selectors) == 0 {
return 0
}
count := 0
for _, pod := range nodeInfo.Pods() {
// Ignore pods being deleted for spreading purposes
// Similar to how it is done for SelectorSpreadPriority
if namespace == pod.Namespace && pod.DeletionTimestamp == nil {
matches := true
for _, selector := range selectors {
if !selector.Matches(labels.Set(pod.Labels)) {
matches = false
break
}
}
if matches {
count++
}
}
}
return count
}
这里的计算方式概括一下:
已知Service/RC/RS/StatefulSet这四种对pod进行管理的抽象高层级资源(后面统称高层级资源),选择器都是通过label来匹配pod的,因此,这里将待调度pod的高层级资源的selector选择器依次列出,与node上现运行的pod中的每一个进行依次比较,每出现一次待调度pod的selector,命中了某个现运行pod的标签的情况,则视为匹配成功,命中计数+1,未命中则不加计数(这里的计数越高代表匹配到的现运行pod数量越多,则最终优先级得分应该越低,待会儿在reduce函数里我们可以印证)。
举个例子:
- 假设待调度的为pod-a-1,node-a,node-b上现都运行有若干个pod
- node-a其中有1个pod-a-2与pod-a-1属于同一个Service,那么,node-a的count计数为1;
- node-b中没有pod被pod-a-1的selector命中,则node-b的count计数为0
- 计数越多,则对应的最终优先级得分应该越低,因此node-b的得分会比node-a高
map函数到这里就结束了,但这个计数显然还不能作为节点在此维度的最终得分,因此,下面还有reduce函数
4.1 Reduce函数
基于前面map函数得出的各node的匹配次数count计数,来展开reduce函数运算:
pkg/scheduler/algorithm/priorities/selector_spreading.go:99
func (s *SelectorSpread) CalculateSpreadPriorityReduce(pod *v1.Pod, meta interface{}, nodeNameToInfo map[string]*schedulernodeinfo.NodeInfo, result schedulerapi.HostPriorityList) error {
countsByZone := make(map[string]int, 10)
maxCountByZone := int(0)
maxCountByNodeName := int(0)
for i := range result {
if result[i].Score > maxCountByNodeName {
maxCountByNodeName = result[i].Score
}
zoneID := utilnode.GetZoneKey(nodeNameToInfo[result[i].Host].Node())
if zoneID == "" {
continue
}
countsByZone[zoneID] += result[i].Score
}
for zoneID := range countsByZone {
if countsByZone[zoneID] > maxCountByZone {
maxCountByZone = countsByZone[zoneID]
}
}
haveZones := len(countsByZone) != 0
maxCountByNodeNameFloat64 := float64(maxCountByNodeName)
maxCountByZoneFloat64 := float64(maxCountByZone)
MaxPriorityFloat64 := float64(schedulerapi.MaxPriority)
for i := range result {
// initializing to the default/max node score of maxPriority
fScore := MaxPriorityFloat64
if maxCountByNodeName > 0 {
// 匹配数量最多的node,count=maxCountByNodeName,fScore得分为0
// 匹配数量最少的node,假设count=0,则fScore得分为10
fScore = MaxPriorityFloat64 * (float64(maxCountByNodeName-result[i].Score) / maxCountByNodeNameFloat64)
}
// If there is zone information present, incorporate it
if haveZones {
zoneID := utilnode.GetZoneKey(nodeNameToInfo[result[i].Host].Node())
if zoneID != "" {
zoneScore := MaxPriorityFloat64
if maxCountByZone > 0 {
zoneScore = MaxPriorityFloat64 * (float64(maxCountByZone-countsByZone[zoneID]) / maxCountByZoneFloat64)
}
// 这里将zone层级参与了运算,zoneWeighting=2/3,则nodeWeight取1/3,混合计算最终得分
fScore = (fScore * (1.0 - zoneWeighting)) + (zoneWeighting * zoneScore)
}
}
result[i].Score = int(fScore)
if klog.V(10) {
klog.Infof(
"%v -> %v: SelectorSpreadPriority, Score: (%d)", pod.Name, result[i].Host, int(fScore),
)
}
}
return nil
}
不难发现,这里的Reduce函数统计得分的方式,与传统Function最后一步统计最终得分,步骤可以说是一致的:
// PodAffinityPriority统计最终得分
fScore = float64(schedulerapi.MaxPriority) * ((pm.counts[node.Name] - minCount) / (maxCount - minCount))
只不过这里是使用Map-Reduce风格思想将其步骤解耦为了两步。Reduce函数介绍到此结束
总结
优先级算法相对而言比predicate断言算法要复杂一些,并且在当前版本的维度计算中存在传统Function函数与Map-Reduce风格函数混用的现象,一定程度上提高了阅读的难度,但相信仔细重复阅读代码,还是不难理解的,毕竟数据量还未到达大数据的级别,只是利用了其映射归纳的思想,解耦的同时提高一定的并发性能。
下一篇讲什么呢?我再研究研究,have fun!