17 KiB
P3-Node筛选算法
前言
在上一篇文档中,我们找到调度器筛选node的算法入口pkg/scheduler/core/generic_scheduler.go:162 Schedule()方法
那么在本篇,由此Schedule()函数展开,看一看调度器的node筛选算法,优先级排序算法留作下一篇.
正文
筛选算法入口
Schedule()的筛选算法核心是findNodesThatFit()方法 ,直接跳转过去:
pkg/scheduler/core/generic_scheduler.go:184 --> pkg/scheduler/core/generic_scheduler.go:435
下面注释划出重点,篇幅有限省略部分代码:
func (g *genericScheduler) findNodesThatFit(pod *v1.Pod, nodes []*v1.Node) ([]*v1.Node, FailedPredicateMap, error) {
var filtered []*v1.Node
failedPredicateMap := FailedPredicateMap{}
if len(g.predicates) == 0 {
filtered = nodes
} else {
allNodes := int32(g.cache.NodeTree().NumNodes())
// 筛选的node对象的数量,点击进去可查看详情,当集群规模小于100台时,全部检查,当集群大于100台时,
// 检查指定比例的机器,若指定比例范围内都没有找到合适的node,则继续查找
numNodesToFind := g.numFeasibleNodesToFind(allNodes)
... // 省略
ctx, cancel := context.WithCancel(context.Background())
// 负责筛选节点的匿名函数主体,核心实现在于内部的podFitsOnNode函数
checkNode := func(i int) {
nodeName := g.cache.NodeTree().Next()
fits, failedPredicates, err := podFitsOnNode(
pod,
meta,
g.nodeInfoSnapshot.NodeInfoMap[nodeName],
g.predicates,
g.schedulingQueue,
g.alwaysCheckAllPredicates,
)
if err != nil {
predicateResultLock.Lock()
errs[err.Error()]++
predicateResultLock.Unlock()
return
}
if fits {
length := atomic.AddInt32(&filteredLen, 1)
if length > numNodesToFind {
cancel()
atomic.AddInt32(&filteredLen, -1)
} else {
filtered[length-1] = g.nodeInfoSnapshot.NodeInfoMap[nodeName].Node()
}
} else {
predicateResultLock.Lock()
failedPredicateMap[nodeName] = failedPredicates
predicateResultLock.Unlock()
}
}
// 标记一下这里,并发执行筛选,待会儿看看它的并发是怎么设计的
// Stops searching for more nodes once the configured number of feasible nodes
// are found.
workqueue.ParallelizeUntil(ctx, 16, int(allNodes), checkNode)
// 调度器的扩展处理逻辑,如自定义的扩展筛选、优先级排序算法
if len(filtered) > 0 && len(g.extenders) != 0 {
... // 省略
}
// 返回结果
return filtered, failedPredicateMap, nil
}
这里一眼就可以看出核心匿名函数内的主体是podFitsOnNode(),但是并不是直接执行podFitsOnNode()函数,而是又封装了一层函数,这个函数的作用是在外层使用nodeName := g.cache.NodeTree().Next()来获取要判断的node主体,传递给podFitsOnNode()函数,而后对podFitsOnNode函数执行返回的结果进行处理。着眼于其下的并发处理实现:workqueue.ParallelizeUntil(ctx, 16, int(allNodes), checkNode),就可以理解这样封装的好处了,来看看并发实现的内部吧
并发控制
vendor/k8s.io/client-go/util/workqueue/parallelizer.go:38
func ParallelizeUntil(ctx context.Context, workers, pieces int, doWorkPiece DoWorkPieceFunc) {
var stop <-chan struct{}
if ctx != nil {
stop = ctx.Done()
}
toProcess := make(chan int, pieces)
for i := 0; i < pieces; i++ {
toProcess <- i
}
close(toProcess)
if pieces < workers {
workers = pieces
}
wg := sync.WaitGroup{}
wg.Add(workers)
for i := 0; i < workers; i++ {
go func() {
defer utilruntime.HandleCrash()
defer wg.Done()
for piece := range toProcess {
select {
case <-stop:
return
default:
doWorkPiece(piece)
}
}
}()
}
wg.Wait()
}
敲黑板记笔记:
1.chan struct{}是什么鬼? struct{}类型的chan,不占用内存,通常用作go协程之间传递信号,详情可参
考:https://dave.cheney.net/2014/03/25/the-empty-struct
2.ParallelizeUntil函数接收4个参数,分别是父协程上下文,max workers,task number,task执行函数,它启动
指定数量的worker协程,数量最大不超过max workers,共同完成指定数量(task number)的task,每个task执行指
定的执行函数。这意味着,ParallelizeUntil函数只负责并发的数量,而并发的对象主体,需要由task执行函数自行
获取。因此我们看到上面的checkNode匿名函数,内部通过nodeName := g.cache.NodeTree().Next()来获取task
的对象主体,g.cache.NodeTree()对象内部必然维护了一个指针,来获取当前task所需的对象主体。这里使用的并发粒度是以node为单位的.
ParallelizeUntil()的这种实现方式,可以很好地将并发实现和具体功能实现解耦,因此只要功能实现内部处理好指针,
都可以复用ParallelizeUntil()函数来实现并发的控制。
来看看checkNode()内部是怎样获取每个子协程对应的node主体的:
pkg/scheduler/core/generic_scheduler.go:460 --> pkg/scheduler/internal/cache/node_tree.go:161
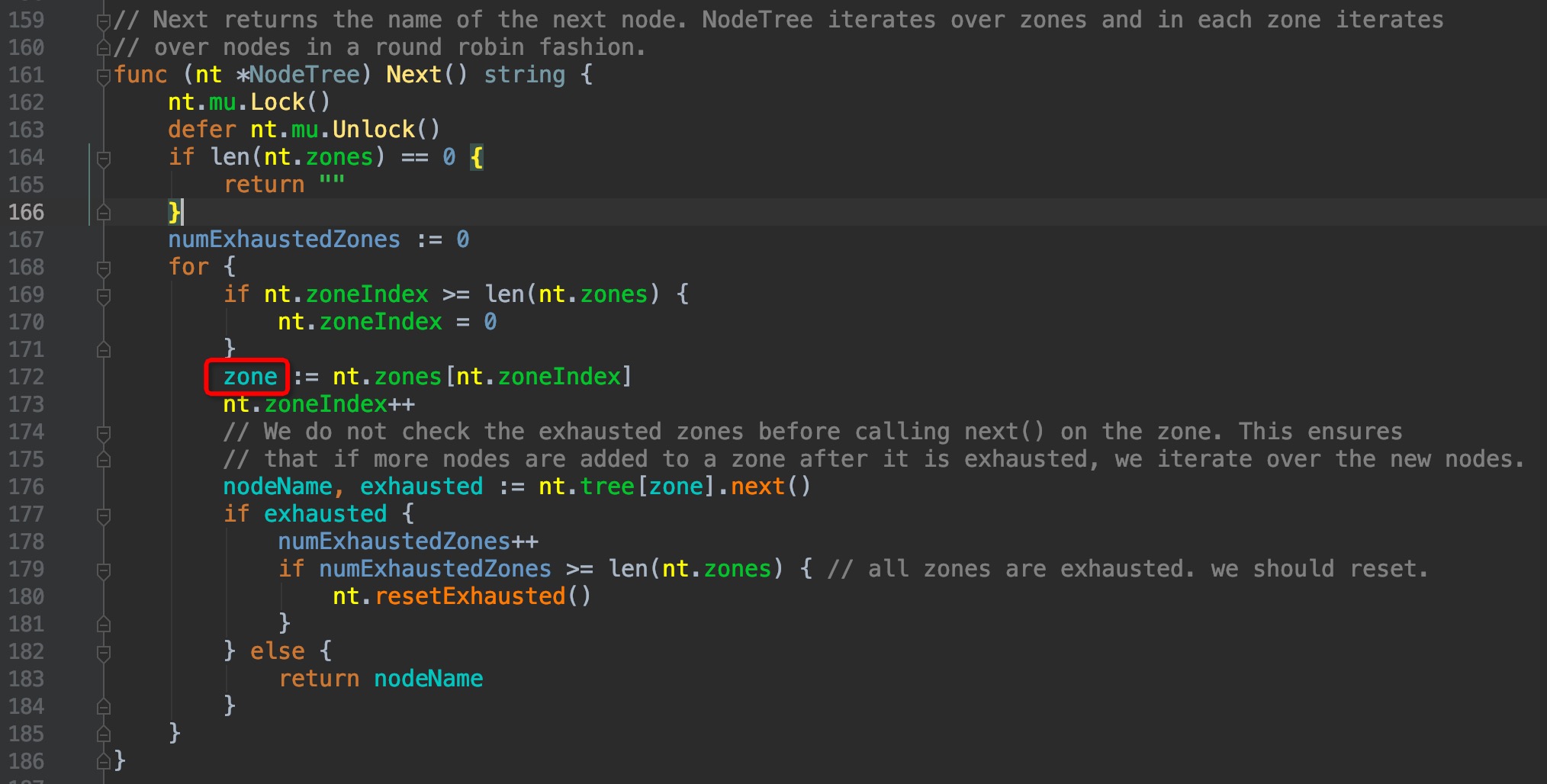
可以看到,这里有一个zone的逻辑层级,这个层级仿佛没有见过,google了一番才了解了这个颇为冷门的功能:这是一个轻量级的支持集群联邦特性的实现,单个cluster可以属于多个zone,但这个功能目前只有GCE和AWS支持,且绝大多数的使用场景也用不到,可以说是颇为冷门。默认情况下,cluster只属于一个zone,可以理解为cluster和zone是同层级,因此后面见到有关zone相关的层级,我们直接越过它。有兴趣的朋友可以了解一下zone的概念:
https://kubernetes.io/docs/setup/best-practices/multiple-zones/
继续往下, pkg/scheduler/internal/cache/node_tree.go:176 --> pkg/scheduler/internal/cache/node_tree.go:47
// nodeArray is a struct that has nodes that are in a zone.
// We use a slice (as opposed to a set/map) to store the nodes because iterating over the nodes is
// a lot more frequent than searching them by name.
type nodeArray struct {
nodes []string
lastIndex int
}
func (na *nodeArray) next() (nodeName string, exhausted bool) {
if len(na.nodes) == 0 {
klog.Error("The nodeArray is empty. It should have been deleted from NodeTree.")
return "", false
}
if na.lastIndex >= len(na.nodes) {
return "", true
}
nodeName = na.nodes[na.lastIndex]
na.lastIndex++
return nodeName, false
}
果然可以看到, nodeArray结构体内部维护了一个lastIndex指针来获取node,印证了上面的推测。
回到pkg/scheduler/core/generic_scheduler.go:461,正式进入podFitsOnNode内部:
func podFitsOnNode(
pod *v1.Pod,
meta predicates.PredicateMetadata,
info *schedulernodeinfo.NodeInfo,
predicateFuncs map[string]predicates.FitPredicate,
queue internalqueue.SchedulingQueue,
alwaysCheckAllPredicates bool,
) (bool, []predicates.PredicateFailureReason, error) {
var failedPredicates []predicates.PredicateFailureReason
podsAdded := false
for i := 0; i < 2; i++ {
metaToUse := meta
nodeInfoToUse := info
if i == 0 {
podsAdded, metaToUse, nodeInfoToUse = addNominatedPods(pod, meta, info, queue)
} else if !podsAdded || len(failedPredicates) != 0 {
break
}
for _, predicateKey := range predicates.Ordering() {
var (
fit bool
reasons []predicates.PredicateFailureReason
err error
)
//TODO (yastij) : compute average predicate restrictiveness to export it as Prometheus metric
if predicate, exist := predicateFuncs[predicateKey]; exist {
fit, reasons, err = predicate(pod, metaToUse, nodeInfoToUse)
if err != nil {
return false, []predicates.PredicateFailureReason{}, err
}
... // 省略
}
}
}
return len(failedPredicates) == 0, failedPredicates, nil
}
注释和部分代码已省略,基于podFitsOnNode函数内的注释,来做一下说明:
1.通过指定pod.spec.priority,来为pod指定调度优先级的功能,在1.14版本已经正式GA,这里所有的调度相关功能都会考虑到pod优先级,因为优先级的原因,因此除了正常的Schedule调度动作外,还会有Preempt抢占调度的行为,这个podFitsOnNode()方法会被在这两个地方调用。
2.Schedule调度时,会取出当前node上所有已存在的pod,与被提名调度的pod进行优先级对比,取出所有优先级大于等于提名pod,将它们需求的资源加上提名pod所需求的资源,进行汇总,predicate筛选算法计算的时候,是基于这个汇总的结果来进行计算的。举个例子,node A memory cap = 128Gi,其上现承载有20个pod,其中10个pod的优先级大于等于提名pod,它们sum(request.memory) = 100Gi,若提名pod的request.memory = 32Gi, (100+32) > 128,因此筛选时会在内存选项失败返回false;若提名pod的request.memory = 16Gi,(100+16) < 128,则内存项筛选通过。那么剩下的优先级较低的10个pod就不考虑它们了吗,它们也要占用内存呀?处理方式是:如果它们占用内存造成node资源不足无法调度提名pod,则调度器会将它们剔出当前node,这即是Preempt抢占。Preempt抢占的说明会在后面的文章中补充.
3.对于每个提名pod,其调度过程会被重复执行1次,为什么需要重复执行呢?考虑到有一些场景下,会判断到pod之间的亲和力筛选策略,例如pod A对pod B有亲和性,这时它们一起调度到node上,但pod B此时实际并未完成调度启动,那么pod A的inter-pod affinity predicates一定会失败,因此,重复执行1次筛选过程是有必要的.
有了以上理解,我们接着看代码,图中已注释:
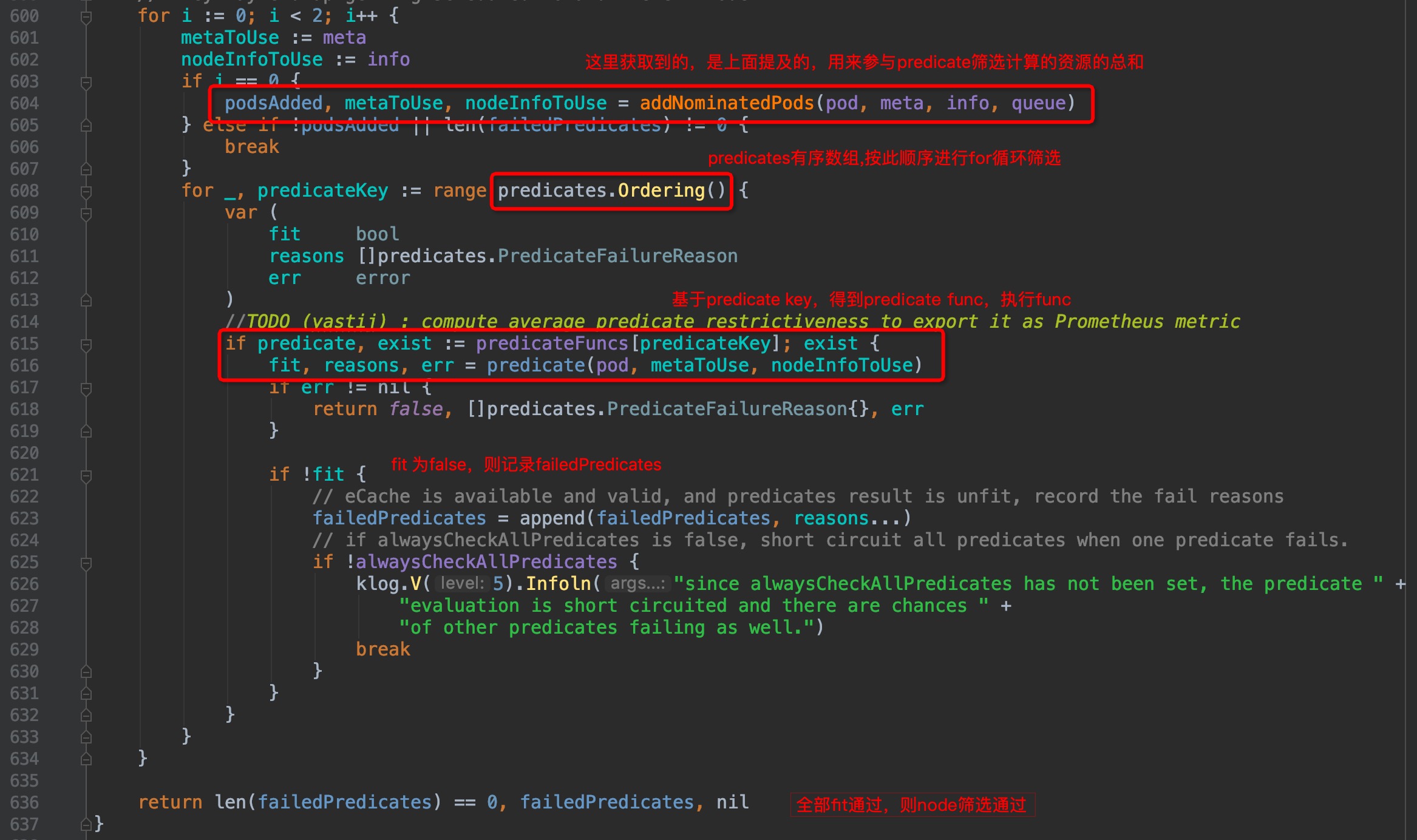
图中pkg/scheduler/core/generic_scheduler.go:608位置正式开始了逐个计算筛选算法,那么筛选方法、筛选方法顺序在哪里呢?在上一篇P2-框架篇中已经有讲过,默认调度算法都在pkg/scheduler/algorithm/路径下,我们接着往下看.
Predicates Function
筛选算法相关的key/func/ordering,全部集中在pkg/scheduler/algorithm/predicates/predicates.go这个文件中
筛选顺序
pkg/scheduler/algorithm/predicates/predicates.go:142
// 默认predicate顺序
var (
predicatesOrdering = []string{CheckNodeConditionPred, CheckNodeUnschedulablePred,
GeneralPred, HostNamePred, PodFitsHostPortsPred,
MatchNodeSelectorPred, PodFitsResourcesPred, NoDiskConflictPred,
PodToleratesNodeTaintsPred, PodToleratesNodeNoExecuteTaintsPred, CheckNodeLabelPresencePred,
CheckServiceAffinityPred, MaxEBSVolumeCountPred, MaxGCEPDVolumeCountPred, MaxCSIVolumeCountPred,
MaxAzureDiskVolumeCountPred, MaxCinderVolumeCountPred, CheckVolumeBindingPred, NoVolumeZoneConflictPred,
CheckNodeMemoryPressurePred, CheckNodePIDPressurePred, CheckNodeDiskPressurePred, MatchInterPodAffinityPred}
)
官方的备注:
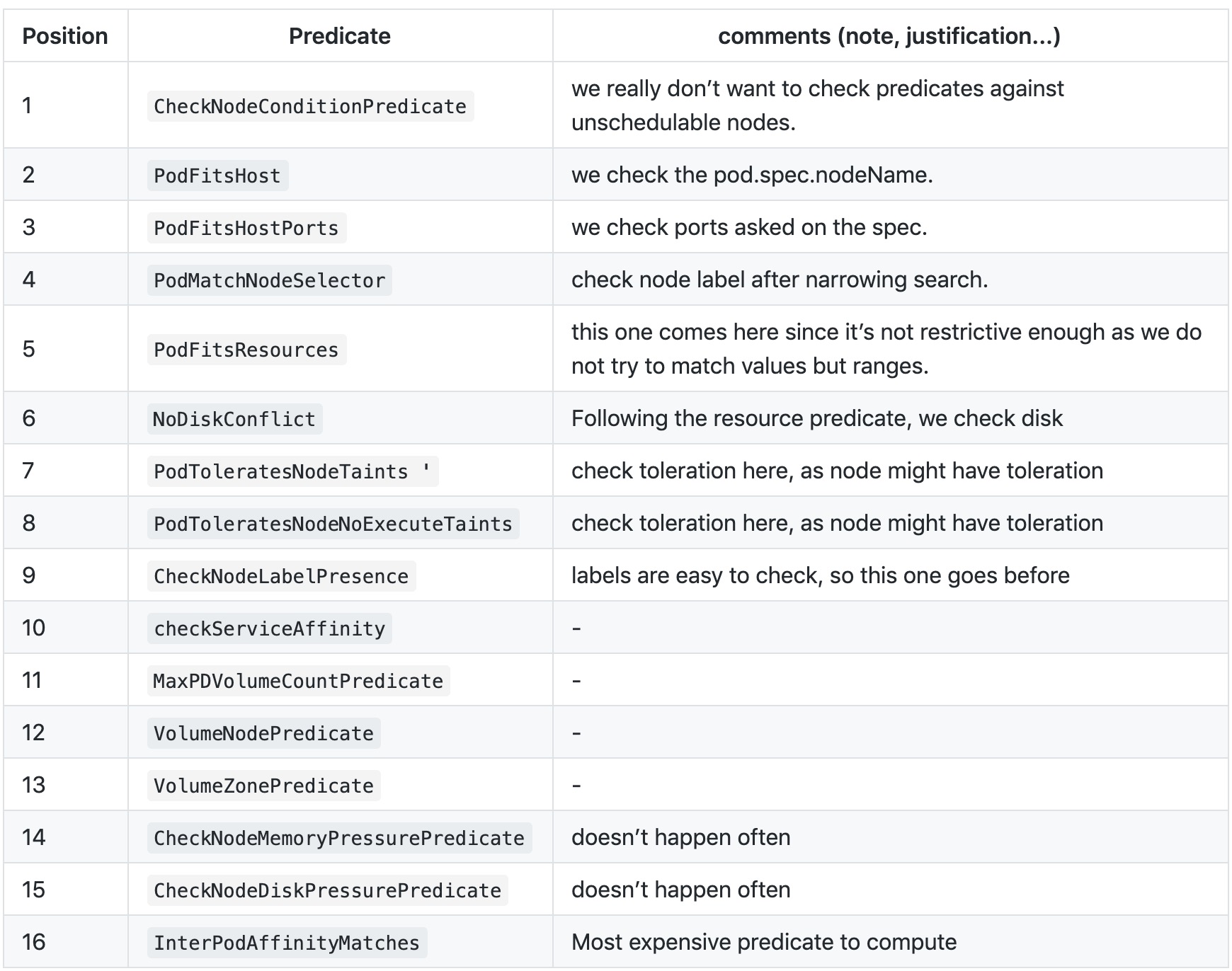
筛选key
const (
// MatchInterPodAffinityPred defines the name of predicate MatchInterPodAffinity.
MatchInterPodAffinityPred = "MatchInterPodAffinity"
// CheckVolumeBindingPred defines the name of predicate CheckVolumeBinding.
CheckVolumeBindingPred = "CheckVolumeBinding"
// CheckNodeConditionPred defines the name of predicate CheckNodeCondition.
CheckNodeConditionPred = "CheckNodeCondition"
// GeneralPred defines the name of predicate GeneralPredicates.
GeneralPred = "GeneralPredicates"
// HostNamePred defines the name of predicate HostName.
HostNamePred = "HostName"
// PodFitsHostPortsPred defines the name of predicate PodFitsHostPorts.
PodFitsHostPortsPred = "PodFitsHostPorts"
// MatchNodeSelectorPred defines the name of predicate MatchNodeSelector.
MatchNodeSelectorPred = "MatchNodeSelector"
// PodFitsResourcesPred defines the name of predicate PodFitsResources.
PodFitsResourcesPred = "PodFitsResources"
// NoDiskConflictPred defines the name of predicate NoDiskConflict.
NoDiskConflictPred = "NoDiskConflict"
// PodToleratesNodeTaintsPred defines the name of predicate PodToleratesNodeTaints.
PodToleratesNodeTaintsPred = "PodToleratesNodeTaints"
// CheckNodeUnschedulablePred defines the name of predicate CheckNodeUnschedulablePredicate.
CheckNodeUnschedulablePred = "CheckNodeUnschedulable"
// PodToleratesNodeNoExecuteTaintsPred defines the name of predicate PodToleratesNodeNoExecuteTaints.
PodToleratesNodeNoExecuteTaintsPred = "PodToleratesNodeNoExecuteTaints"
// CheckNodeLabelPresencePred defines the name of predicate CheckNodeLabelPresence.
CheckNodeLabelPresencePred = "CheckNodeLabelPresence"
// CheckServiceAffinityPred defines the name of predicate checkServiceAffinity.
CheckServiceAffinityPred = "CheckServiceAffinity"
// MaxEBSVolumeCountPred defines the name of predicate MaxEBSVolumeCount.
// DEPRECATED
// All cloudprovider specific predicates are deprecated in favour of MaxCSIVolumeCountPred.
MaxEBSVolumeCountPred = "MaxEBSVolumeCount"
// MaxGCEPDVolumeCountPred defines the name of predicate MaxGCEPDVolumeCount.
// DEPRECATED
// All cloudprovider specific predicates are deprecated in favour of MaxCSIVolumeCountPred.
MaxGCEPDVolumeCountPred = "MaxGCEPDVolumeCount"
// MaxAzureDiskVolumeCountPred defines the name of predicate MaxAzureDiskVolumeCount.
// DEPRECATED
// All cloudprovider specific predicates are deprecated in favour of MaxCSIVolumeCountPred.
MaxAzureDiskVolumeCountPred = "MaxAzureDiskVolumeCount"
// MaxCinderVolumeCountPred defines the name of predicate MaxCinderDiskVolumeCount.
// DEPRECATED
// All cloudprovider specific predicates are deprecated in favour of MaxCSIVolumeCountPred.
MaxCinderVolumeCountPred = "MaxCinderVolumeCount"
// MaxCSIVolumeCountPred defines the predicate that decides how many CSI volumes should be attached
MaxCSIVolumeCountPred = "MaxCSIVolumeCountPred"
// NoVolumeZoneConflictPred defines the name of predicate NoVolumeZoneConflict.
NoVolumeZoneConflictPred = "NoVolumeZoneConflict"
// CheckNodeMemoryPressurePred defines the name of predicate CheckNodeMemoryPressure.
CheckNodeMemoryPressurePred = "CheckNodeMemoryPressure"
// CheckNodeDiskPressurePred defines the name of predicate CheckNodeDiskPressure.
CheckNodeDiskPressurePred = "CheckNodeDiskPressure"
// CheckNodePIDPressurePred defines the name of predicate CheckNodePIDPressure.
CheckNodePIDPressurePred = "CheckNodePIDPressure"
// DefaultMaxGCEPDVolumes defines the maximum number of PD Volumes for GCE
// GCE instances can have up to 16 PD volumes attached.
DefaultMaxGCEPDVolumes = 16
// DefaultMaxAzureDiskVolumes defines the maximum number of PD Volumes for Azure
// Larger Azure VMs can actually have much more disks attached.
// TODO We should determine the max based on VM size
DefaultMaxAzureDiskVolumes = 16
// KubeMaxPDVols defines the maximum number of PD Volumes per kubelet
KubeMaxPDVols = "KUBE_MAX_PD_VOLS"
// EBSVolumeFilterType defines the filter name for EBSVolumeFilter.
EBSVolumeFilterType = "EBS"
// GCEPDVolumeFilterType defines the filter name for GCEPDVolumeFilter.
GCEPDVolumeFilterType = "GCE"
// AzureDiskVolumeFilterType defines the filter name for AzureDiskVolumeFilter.
AzureDiskVolumeFilterType = "AzureDisk"
// CinderVolumeFilterType defines the filter name for CinderVolumeFilter.
CinderVolumeFilterType = "Cinder"
)
筛选Function
每个predicate key对应的function name一般为${KEY}Predicate,function的内容其实都比较简单,不一一介绍了,自行查看,这里仅列举一个:
pkg/scheduler/algorithm/predicates/predicates.go:1567
// CheckNodeMemoryPressurePredicate checks if a pod can be scheduled on a node
// reporting memory pressure condition.
func CheckNodeMemoryPressurePredicate(pod *v1.Pod, meta PredicateMetadata, nodeInfo *schedulernodeinfo.NodeInfo) (bool, []PredicateFailureReason, error) {
var podBestEffort bool
if predicateMeta, ok := meta.(*predicateMetadata); ok {
podBestEffort = predicateMeta.podBestEffort
} else {
// We couldn't parse metadata - fallback to computing it.
podBestEffort = isPodBestEffort(pod)
}
// pod is not BestEffort pod
if !podBestEffort {
return true, nil, nil
}
// check if node is under memory pressure
if nodeInfo.MemoryPressureCondition() == v1.ConditionTrue {
return false, []PredicateFailureReason{ErrNodeUnderMemoryPressure}, nil
}
return true, nil, nil
}
筛选算法过程到这里就已然清晰明了!
重点回顾
筛选算法代码中的几个不易理解的点(亮点?)圈出:
- node粒度的并发控制
- 基于优先级的pod资源总和归纳计算
- 筛选过程重复1次
本篇调度器筛选算法篇到此结束,下一篇将学习调度器优先级排序的算法详情内容