# Reinforcement Learning과 Q-Learning 소개하기

> Sketchnote by [Tomomi Imura](https://www.twitter.com/girlie_mac)
Reinforcement learning에는 3가지 중요한 컨셉이 섞여있습니다: agent, 일부 states, 그리고 state 당 actions 세트. 특정 상황에서 행동하면 agent에게 보상이 주어집니다. Super Mario 게임을 다시 상상해봅니다. 마리오가 되어서, 게임 레벨에 진입하고, 구덩이 옆에 있습니다. 그 위에 동전이 있습니다. 게임 레벨에서, 특정 위치에 있는, 마리오가 됩니다 ... 이게 state 입니다. 한 단계 오른쪽으로 이동하면 (action) 구덩이를 빠져서, 낮은 점수를 받습니다. 그러나, 점프 버튼을 누르면 점수를 얻고 살아남을 수 있습니다. 긍정적인 결과이며, 긍정적인 점수를 줘야 합니다.
reinforcement learning과 (게임) 시뮬레이터로, 살아남고 가능한 많은 점수로 최대 보상을 받는 게임의 플레이 방식을 배울 수 있습니다.
[](https://www.youtube.com/watch?v=lDq_en8RNOo)
> 🎥 Dmitry discuss Reinforcement Learning 들으려면 이미지 클릭
## [강의 전 퀴즈](https://gray-sand-07a10f403.1.azurestaticapps.net/quiz/45/)
## 전제조건 및 설정
이 강의에서, Python으로 약간의 코드를 실험할 예정입니다. 이 강의에서 Jupyter Notebook을, 컴퓨터나 클라우드 어디에서나 실행해야 합니다.
[the lesson notebook](../notebook.ipynb)을 열고 이 강의로 만들 수 있습니다.
> **노트:** 만약 클라우드에서 코드를 연다면, 노트북 코드에서 사용하는 [`rlboard.py`](../rlboard.py) 파일도 가져올 필요가 있습니다. 노트북과 같은 디렉토리에 추가합니다.
## 소개
이 강의에서, 러시아 작곡가 [Sergei Prokofiev](https://en.wikipedia.org/wiki/Sergei_Prokofiev)의 동화 곡에 영감을 받은, **[Peter and the Wolf](https://en.wikipedia.org/wiki/Peter_and_the_Wolf)** 의 월드를 탐험해볼 예정입니다. **Reinforcement Learning**으로 Peter가 환경을 탐험하고, 맛있는 사과를 모으고 늑대는 피할 것입니다.
**Reinforcement Learning** (RL)은 많은 실험을 돌려서 일부 **environment**에서 **agent**의 최적화된 동작을 배울 수 있는 훈련 기술입니다. 이 환경의 agent는 **reward function**으로 정의된, 약간의 **goal**을 가지고 있어야 합니다.
## 환경
단순하고자, Peter의 월드를 이렇게 `width` x `height` 크기의 정사각형 보드로 고려해보려 합니다:
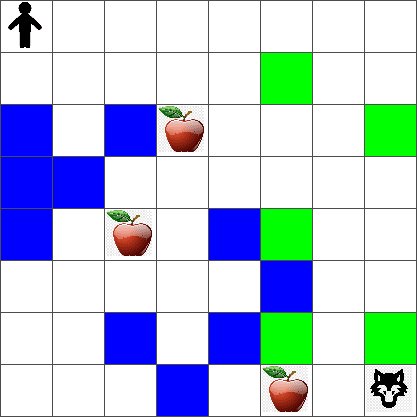
이 보드에서 각 셀은 이 중 하나 입니다:
* **ground**, Peter와 다른 생명체가 걸을 수 있습니다.
* **water**, 무조건 걸을 수 없습니다.
* a **tree** or **grass**, 휴식할 수 있는 장소입니다.
* an **apple**, Peter가 스스로 먹으려고 찾을 수 있는 물건입니다.
* a **wolf**, 위험하고 피해야 합니다.
이 환경에서 작성하는 코드가 포함되어 있는, [`rlboard.py`](../rlboard.py) 별도 Python 모듈이 있습니다. 그러므로 이 코드는 컨셉을 이해하는 게 중요하지 않으므로, 모듈을 가져오고 샘플 보드를 (code block 1) 만들고자 사용할 예정입니다:
```python
from rlboard import *
width, height = 8,8
m = Board(width,height)
m.randomize(seed=13)
m.plot()
```
이 코드는 위와 비슷하게 그림을 출력하게 됩니다.
## 액션과 정책
예시에서, Peter의 목표는 늑대와 장애물을 피하고, 사과를 찾는 것입니다. 그러기 위해서, 사과를 찾기 전까지 걷게 됩니다.
그러므로, 어느 위치에서, 다음 액션 중 하나를 선택할 수 있습니다: up, down, left 그리고 right.
이 액션을 dictionary로 정의하고, 좌표 변경의 쌍을 맵핑합니다. 오른쪽 이동(`R`)은 `(1,0)` 쌍에 대응합니다. (code block 2):
```python
actions = { "U" : (0,-1), "D" : (0,1), "L" : (-1,0), "R" : (1,0) }
action_idx = { a : i for i,a in enumerate(actions.keys()) }
```
요약해보면, 이 시나리오의 전략과 목표는 다음과 같습니다:
- **agent (Peter)의 전략**은, **policy**로 불리며 정의됩니다. 정책은 주어진 state에서 action을 반환하는 함수입니다. 이 케이스에서, 문제의 state는 플레이어의 현재 위치를 포함해서, 보드로 표현합니다.
- **reinforcement learning의 목표**는, 결국 문제를 효율적으로 풀수 있게 좋은 정책을 학습하는 것입니다. 그러나, 기본적으로, **random walk**라고 불리는 단순한 정책을 고려해보겠습니다.
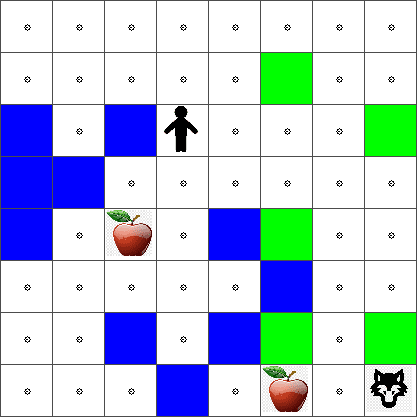
## 랜덤 워킹
랜덤 워킹 전략으로 첫 문제를 풀어봅시다. 랜덤 워킹으로, 사과에 닿을 때까지, 허용된 액션에서 다음 액션을 무작위로 선택합니다 (code block 3).
1. 아래 코드로 랜덤 워킹을 구현합니다:
```python
def random_policy(m):
return random.choice(list(actions))
def walk(m,policy,start_position=None):
n = 0 # number of steps
# set initial position
if start_position:
m.human = start_position
else:
m.random_start()
while True:
if m.at() == Board.Cell.apple:
return n # success!
if m.at() in [Board.Cell.wolf, Board.Cell.water]:
return -1 # eaten by wolf or drowned
while True:
a = actions[policy(m)]
new_pos = m.move_pos(m.human,a)
if m.is_valid(new_pos) and m.at(new_pos)!=Board.Cell.water:
m.move(a) # do the actual move
break
n+=1
walk(m,random_policy)
```
`walk`를 부르면 실행할 때마다 다르게, 일치하는 경로의 길이를 반환합니다.
1. 워킹 실험을 여러 번 (say, 100) 실행하고, 통계 결과를 출력합니다 (code block 4):
```python
def print_statistics(policy):
s,w,n = 0,0,0
for _ in range(100):
z = walk(m,policy)
if z<0:
w+=1
else:
s += z
n += 1
print(f"Average path length = {s/n}, eaten by wolf: {w} times")
print_statistics(random_policy)
```
가까운 사과으로 가는 평균 걸음이 대략 5-6 걸음이라는 사실로 주어졌을 때, 경로의 평균 길이가 대략 30-40 걸음이므로, 꽤 오래 걸립니다.
또 랜덤 워킹을 하는 동안 Peter의 행동이 어떻게 되는지 확인할 수 있습니다:
## 보상 함수
정책을 더 지능적으로 만드려면, 행동을 다른 것보다 "더" 좋은지 이해할 필요가 있습니다. 이렇게, 목표를 정의할 필요가 있습니다.
목표는 각 state에서 일부 점수 값을 반환할 예정인, **reward function**로 정의할 수 있습니다. 높은 점수일수록, 더 좋은 보상 함수입니다. (code block 5)
```python
move_reward = -0.1
goal_reward = 10
end_reward = -10
def reward(m,pos=None):
pos = pos or m.human
if not m.is_valid(pos):
return end_reward
x = m.at(pos)
if x==Board.Cell.water or x == Board.Cell.wolf:
return end_reward
if x==Board.Cell.apple:
return goal_reward
return move_reward
```
보상 함수에 대해서 흥미로운 것은 많은 경우에, *게임이 끝날 때만 중요한 보상을 줍니다*. 알고리즘이 끝날 때 긍정적인 보상으로 이어지는 "good" 단계를 어떻게든지 기억하고, 중요도를 올려야 된다는 점을 의미합니다. 비슷하게, 나쁜 결과를 이끄는 모든 동작을 하지 말아야 합니다.
## Q-Learning
여기에서 논의할 알고리즘은 **Q-Learning**이라고 불립니다. 이 알고리즘에서, 정책은 **Q-Table** 불리는 함수 (데이터 구조)로 정의합니다. 주어진 state에서 각 액션의 "goodness"를 기록합니다.
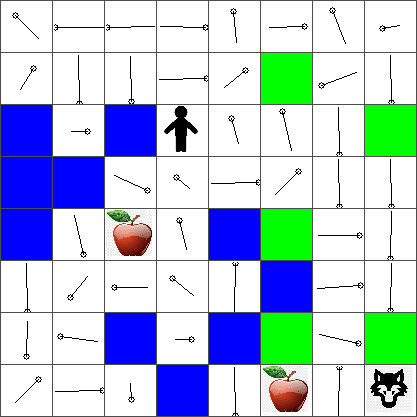
테이블, 또는 multi-dimensional 배열로 자주 표현하는 게 편리하므로 Q-Table이라고 부릅니다. 보드는 `width` x `height` 크기라서, `width` x `height` x `len(actions)` 형태의 numpy 배열로 Q-Table을 표현할 수 있습니다 : (code block 6)
```python
Q = np.ones((width,height,len(actions)),dtype=np.float)*1.0/len(actions)
```
Q-Table의 모든 값이 같다면, 이 케이스에서 - 0.25 으로 초기화합니다. 각자 state는 모두가 충분히 동일하게 움직이므로, "random walk" 정책에 대응됩니다. 보드에서 테이블을 시각화하기 위해서 Q-Table을 `plot` 함수에 전달할 수 있습니다: `m.plot(Q)`.
각자 셀의 중심에 이동하는 방향이 표시되는 "arrow"가 있습니다. 모든 방향은 같으므로, 점이 출력됩니다.
사과로 가는 길을 더 빨리 찾을 수 있으므로, 지금부터 시물레이션을 돌리고, 환경을 찾고, 그리고 더 좋은 Q-Table 분포 값을 배울 필요가 있습니다.
## Q-Learning의 핵심: Bellman 방정식
움직이기 시작하면, 각 액션은 알맞은 보상을 가집니다, 예시로. 이론적으로 가장 높은 보상을 바로 주면서 다음 액션을 선택할 수 있습니다. 그러나, 대부분 state 에서, 행동은 사과에 가려는 목표가 성취감에 없으므로, 어떤 방향이 더 좋은지 바로 결정하지 못합니다.
> 즉시 발생되는 결과가 아니라, 시뮬레이션의 끝에 도달했을 때 생기는, 최종 결과라는 것을 기억합니다.
딜레이된 보상에 대해 설명하려면, 문제를 재귀적으로 생각할 수 있는, **[dynamic programming](https://en.wikipedia.org/wiki/Dynamic_programming)** 의 원칙을 사용할 필요가 있습니다.
지금 state *s*에 있고, state *s'* 다음으로 움직이길 원한다고 가정합니다. 그렇게 하면, 보상 함수로 정의된 즉시 보상 *r(s,a)* 를 일부 미래 보상과 함께 받게 될 예정입니다. Q-Table이 각 액션의 "attractiveness"를 올바르게 가져온다고 가정하면, *s'* state에서 *Q(s',a')* 의 최대 값에 대응하는 *a* 액션을 선택하게 됩니다. 그래서, state *s*에서 얻을 수 있는 가능한 좋은 미래 보상은 `max`a'*Q(s',a')*로 정의될 예정입니다. (여기의 최대는 state *s'*에서 가능한 모든 *a'* 액션으로 계산합니다.)
주어진 *a* 액션에서, state *s*의 Q-Table 값을 계산하는 **Bellman formula**가 주어집니다:
 여기 y는 미래 보상보다 현재 보상을 얼마나 선호하는지 판단하는 **discount factor**로 불리고 있고 반대의 경우도 그렇습니다.
## 알고리즘 학습
다음 방정식이 주어지면, 학습 알고리즘의 의사 코드를 작성할 수 있습니다:
* 모든 state와 액션에 대하여 같은 숫자로 Q-Table Q 초기화
* 학습률 α ← 1 설정
* 수차례 시뮬레이션 반복
1. 랜덤 위치에서 시작
1. 반복
1. state *s* 에서 *a* 액션 선택
2. 새로운 state *s'* 로 이동해서 액션 수행
3. 게임이 끝나는 조건이 생기거나, 또는 총 보상이 너무 작은 경우 - 시뮬레이션 종료
4. 새로운 state에서 *r* 보상 계산
5. Bellman 방정식 따라서 Q-Function 업데이트 : *Q(s,a)* ← *(1-α)Q(s,a)+α(r+γ maxa'Q(s',a'))*
6. *s* ← *s'*
7. 총 보상을 업데이트하고 α. 감소
## Exploit vs. explore
다음 알고리즘에서, 2.1 단계에 액션을 어떻게 선택하는지 명확하지 않습니다. 만약 랜덤으로 액션을 선택하면, 환경을 램덤으로 **explore**하게 되고, 일반적으로 가지 않는 영역도 탐험하게 되면서 꽤 자주 죽을 것 같습니다. 다른 방식은 이미 알고 있는 Q-Table 값을 **exploit**하고, state *s*에서 최고의 액션 (높은 Q-Table 값)을 선택하는 방식입니다. 그러나, 다른 state를 막을 수 있고, 최적의 솔루션을 찾지 못할 수 있습니다.
따라서, 최적의 방식은 exploration과 exploitation 사이 밸런스를 잘 조절하는 것입니다. 이는 Q-Table 값에 확률로 비례한 state *s*에서 액션을 선택할 수 있습니다. 초반에, Q-Table 값이 모두 같을 때, 랜덤 선택에 해당하겠지만, 환경을 더 배운다면, agent가 탐험하지 않은 경로를 선택하면서, 최적 경로를 따라갈 가능성이 커집니다.
## Python 구현
지금 학습 알고리즘을 구현할 준비가 되었습니다. 그 전에, Q-Table에서 임의 숫자를 액션과 대응되는 확률 백터로 변환하는 일부 함수가 필요합니다.
1. `probs()` 함수를 만듭니다:
```python
def probs(v,eps=1e-4):
v = v-v.min()+eps
v = v/v.sum()
return v
```
백터의 모든 컴포넌트가 똑같다면, 초기 케이스에서 0으로 나누는 것을 피하기 위해서 원본 백터에 약간의 `eps`를 추가합니다.
**epochs**라고 불리는, 5000번 실험으로 학습 알고리즘을 실행합니다: (code block 8)
```python
for epoch in range(5000):
# Pick initial point
m.random_start()
# Start travelling
n=0
cum_reward = 0
while True:
x,y = m.human
v = probs(Q[x,y])
a = random.choices(list(actions),weights=v)[0]
dpos = actions[a]
m.move(dpos,check_correctness=False) # we allow player to move outside the board, which terminates episode
r = reward(m)
cum_reward += r
if r==end_reward or cum_reward < -1000:
lpath.append(n)
break
alpha = np.exp(-n / 10e5)
gamma = 0.5
ai = action_idx[a]
Q[x,y,ai] = (1 - alpha) * Q[x,y,ai] + alpha * (r + gamma * Q[x+dpos[0], y+dpos[1]].max())
n+=1
```
이 알고리즘이 실행된 후, Q-Table은 각 단계에 다른 액션의 attractiveness를 정의하는 값으로 업데이트해야 합니다. 움직이고 싶은 방향의 방향으로 각 셀에 백터를 plot해서 Q-Table을 시각화할 수 있습니다. 단순하게, 화살표 머리 대신 작은 원을 그립니다.
여기 y는 미래 보상보다 현재 보상을 얼마나 선호하는지 판단하는 **discount factor**로 불리고 있고 반대의 경우도 그렇습니다.
## 알고리즘 학습
다음 방정식이 주어지면, 학습 알고리즘의 의사 코드를 작성할 수 있습니다:
* 모든 state와 액션에 대하여 같은 숫자로 Q-Table Q 초기화
* 학습률 α ← 1 설정
* 수차례 시뮬레이션 반복
1. 랜덤 위치에서 시작
1. 반복
1. state *s* 에서 *a* 액션 선택
2. 새로운 state *s'* 로 이동해서 액션 수행
3. 게임이 끝나는 조건이 생기거나, 또는 총 보상이 너무 작은 경우 - 시뮬레이션 종료
4. 새로운 state에서 *r* 보상 계산
5. Bellman 방정식 따라서 Q-Function 업데이트 : *Q(s,a)* ← *(1-α)Q(s,a)+α(r+γ maxa'Q(s',a'))*
6. *s* ← *s'*
7. 총 보상을 업데이트하고 α. 감소
## Exploit vs. explore
다음 알고리즘에서, 2.1 단계에 액션을 어떻게 선택하는지 명확하지 않습니다. 만약 랜덤으로 액션을 선택하면, 환경을 램덤으로 **explore**하게 되고, 일반적으로 가지 않는 영역도 탐험하게 되면서 꽤 자주 죽을 것 같습니다. 다른 방식은 이미 알고 있는 Q-Table 값을 **exploit**하고, state *s*에서 최고의 액션 (높은 Q-Table 값)을 선택하는 방식입니다. 그러나, 다른 state를 막을 수 있고, 최적의 솔루션을 찾지 못할 수 있습니다.
따라서, 최적의 방식은 exploration과 exploitation 사이 밸런스를 잘 조절하는 것입니다. 이는 Q-Table 값에 확률로 비례한 state *s*에서 액션을 선택할 수 있습니다. 초반에, Q-Table 값이 모두 같을 때, 랜덤 선택에 해당하겠지만, 환경을 더 배운다면, agent가 탐험하지 않은 경로를 선택하면서, 최적 경로를 따라갈 가능성이 커집니다.
## Python 구현
지금 학습 알고리즘을 구현할 준비가 되었습니다. 그 전에, Q-Table에서 임의 숫자를 액션과 대응되는 확률 백터로 변환하는 일부 함수가 필요합니다.
1. `probs()` 함수를 만듭니다:
```python
def probs(v,eps=1e-4):
v = v-v.min()+eps
v = v/v.sum()
return v
```
백터의 모든 컴포넌트가 똑같다면, 초기 케이스에서 0으로 나누는 것을 피하기 위해서 원본 백터에 약간의 `eps`를 추가합니다.
**epochs**라고 불리는, 5000번 실험으로 학습 알고리즘을 실행합니다: (code block 8)
```python
for epoch in range(5000):
# Pick initial point
m.random_start()
# Start travelling
n=0
cum_reward = 0
while True:
x,y = m.human
v = probs(Q[x,y])
a = random.choices(list(actions),weights=v)[0]
dpos = actions[a]
m.move(dpos,check_correctness=False) # we allow player to move outside the board, which terminates episode
r = reward(m)
cum_reward += r
if r==end_reward or cum_reward < -1000:
lpath.append(n)
break
alpha = np.exp(-n / 10e5)
gamma = 0.5
ai = action_idx[a]
Q[x,y,ai] = (1 - alpha) * Q[x,y,ai] + alpha * (r + gamma * Q[x+dpos[0], y+dpos[1]].max())
n+=1
```
이 알고리즘이 실행된 후, Q-Table은 각 단계에 다른 액션의 attractiveness를 정의하는 값으로 업데이트해야 합니다. 움직이고 싶은 방향의 방향으로 각 셀에 백터를 plot해서 Q-Table을 시각화할 수 있습니다. 단순하게, 화살표 머리 대신 작은 원을 그립니다.
 ## 정책 확인
Q-Table은 각 state에서 각 액션의 "attractiveness"를 리스트로 가지고 있으므로, 사용해서 세계에서 실력있는 네비게이션으로 정의하는 것은 상당히 쉽습니다. 간편한 케이스는, 가장 높은 Q-Table 값에 상응하는 액션을 선택할 수 있는 경우입니다: (code block 9)
```python
def qpolicy_strict(m):
x,y = m.human
v = probs(Q[x,y])
a = list(actions)[np.argmax(v)]
return a
walk(m,qpolicy_strict)
```
> 만약 코드를 여러 번 시도하면, 가끔 "hangs"을 일으키고, 노트북에 있는 STOP 버튼을 눌러서 중단할 필요가 있다는 점을 알게 됩니다. 최적 Q-Value의 측면에서 두 state가 "point"하는 상황이 있을 수 있기 때문에, 이러한 케이스에는 agent가 그 state 사이를 무한으로 이동하는 현상이 발생됩니다.
## 🚀 도전
> **Task 1:** 특정 걸음 (say, 100) 숫자로 경로의 최대 길이를 제한하는 `walk` 함수를 수정하고, 가끔 코드가 이 값을 반환하는지 지켜봅니다.
> **Task 2:** 이미 이전에 갔던 곳으로 돌아가지 않도록 `walk` 함수를 수정합니다. `walk`를 반복하는 것을 막을 수 있지만, agent가 탈출할 수 없는 곳은 여전히 "trapped" 될 수 있습니다.
## Navigation
더 좋은 네비게이션 정책으로 exploitation과 exploration을 합쳐서, 훈련 중에 사용했습니다. 이 정책에서, Q-Table 값에 비례해서, 특정 확률로 각 액션을 선택할 예정입니다. 이 전략은 이미 탐험한 위치로 agent가 돌아가는 결과를 도출할 수 있지만, 해당 코드에서 볼 수 있는 것처럼, 원하는 위치로 가는 평균 경로가 매우 짧게 결과가 나옵니다. (`print_statistics`가 100번 시뮬레이션 돌렸다는 점을 기억합니다): (code block 10)
```python
def qpolicy(m):
x,y = m.human
v = probs(Q[x,y])
a = random.choices(list(actions),weights=v)[0]
return a
print_statistics(qpolicy)
```
이 코드가 실행된 후, 3-6의 범위에서, 이전보다 매우 작은 평균 경로 길이를 얻어야 합니다.
## 학습 프로세스 조사
언급했던 것처럼, 학습 프로세스는 문제 공간의 구조에 대해 얻은 지식에 exploration과 exploration 사이 밸런스를 잘 맞춥니다. 학습 결과가 (agent가 목표로 가는 깗은 경로를 찾을 수 있게 도와주는 능력) 개선되었던 것을 볼 수 있지만, 학습 프로세스를 하는 동안에 평균 경로 길이가 어떻게 작동하는지 보는 것도 흥미롭습니다:
## 정책 확인
Q-Table은 각 state에서 각 액션의 "attractiveness"를 리스트로 가지고 있으므로, 사용해서 세계에서 실력있는 네비게이션으로 정의하는 것은 상당히 쉽습니다. 간편한 케이스는, 가장 높은 Q-Table 값에 상응하는 액션을 선택할 수 있는 경우입니다: (code block 9)
```python
def qpolicy_strict(m):
x,y = m.human
v = probs(Q[x,y])
a = list(actions)[np.argmax(v)]
return a
walk(m,qpolicy_strict)
```
> 만약 코드를 여러 번 시도하면, 가끔 "hangs"을 일으키고, 노트북에 있는 STOP 버튼을 눌러서 중단할 필요가 있다는 점을 알게 됩니다. 최적 Q-Value의 측면에서 두 state가 "point"하는 상황이 있을 수 있기 때문에, 이러한 케이스에는 agent가 그 state 사이를 무한으로 이동하는 현상이 발생됩니다.
## 🚀 도전
> **Task 1:** 특정 걸음 (say, 100) 숫자로 경로의 최대 길이를 제한하는 `walk` 함수를 수정하고, 가끔 코드가 이 값을 반환하는지 지켜봅니다.
> **Task 2:** 이미 이전에 갔던 곳으로 돌아가지 않도록 `walk` 함수를 수정합니다. `walk`를 반복하는 것을 막을 수 있지만, agent가 탈출할 수 없는 곳은 여전히 "trapped" 될 수 있습니다.
## Navigation
더 좋은 네비게이션 정책으로 exploitation과 exploration을 합쳐서, 훈련 중에 사용했습니다. 이 정책에서, Q-Table 값에 비례해서, 특정 확률로 각 액션을 선택할 예정입니다. 이 전략은 이미 탐험한 위치로 agent가 돌아가는 결과를 도출할 수 있지만, 해당 코드에서 볼 수 있는 것처럼, 원하는 위치로 가는 평균 경로가 매우 짧게 결과가 나옵니다. (`print_statistics`가 100번 시뮬레이션 돌렸다는 점을 기억합니다): (code block 10)
```python
def qpolicy(m):
x,y = m.human
v = probs(Q[x,y])
a = random.choices(list(actions),weights=v)[0]
return a
print_statistics(qpolicy)
```
이 코드가 실행된 후, 3-6의 범위에서, 이전보다 매우 작은 평균 경로 길이를 얻어야 합니다.
## 학습 프로세스 조사
언급했던 것처럼, 학습 프로세스는 문제 공간의 구조에 대해 얻은 지식에 exploration과 exploration 사이 밸런스를 잘 맞춥니다. 학습 결과가 (agent가 목표로 가는 깗은 경로를 찾을 수 있게 도와주는 능력) 개선되었던 것을 볼 수 있지만, 학습 프로세스를 하는 동안에 평균 경로 길이가 어떻게 작동하는지 보는 것도 흥미롭습니다:
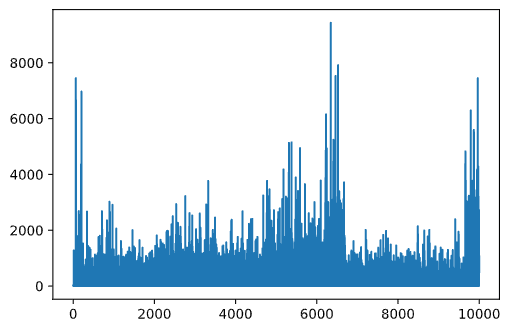 배운 내용을 오약하면 이렇습니다:
- **평균 경로의 길이 증가**. 처음 여기에서 볼 수 있는 것은, 평균 경로 길이가 증가하는 것입니다. 아마도 환경에 대해 잘 모를 때, 물 또는 늑대, 나쁜 state에 걸릴 수 있다는 사실입니다. 더 배우고 지식으로 시작하면, 환경을 오래 탐험할 수 있지만, 여전히 사과가 어디에 자라고 있는지 잘 모릅니다.
- **배울수록, 경로 길이 감소**. 충분히 배웠으면, agent가 목표를 달성하는 것은 더 쉽고, 경로 길이가 줄어들기 시작합니다. 그러나 여전히 탐색하게 되므로, 최적의 경로를 자주 빗겨나가고, 새로운 옵션을 탐험해서, 경로를 최적 경로보다 길게 만듭니다.
- **급격한 길이 증가**. 이 그래프에서 관찰할 수 있는 약간의 포인트는, 갑자기 길이가 길어졌다는 것입니다. 프로세스의 추계학 특성을 나타내고, 일부 포인트에서 새로운 값을 덮어쓰는 Q-Table 계수로 "spoil"될 수 있습니다. 관성적으로 학습률을 줄여서 최소화해야 합니다 (예시로, 훈련이 끝나기 직전에, 작은 값으로만 Q-Table 값을 맞춥니다).
전체적으로, 학습 프로세스의 성공과 퀄리티는 학습률, 학습률 감소, 그리고 감가율처럼 파라미터에 기반하는게 상당히 중요하다는 점을 기억합니다. 훈련하면서 최적화하면 (예시로, Q-Table coefficients), **parameters**와 구별해서, 가끔 **hyperparameters**라고 불립니다. 최고의 hyperparameter 값을 찾는 프로세스는 **hyperparameter optimization**이라고 불리며, 별도의 토픽이 있을 만합니다.
## [강의 후 퀴즈](https://gray-sand-07a10f403.1.azurestaticapps.net/quiz/46/)
## 과제
[A More Realistic World](../assignment.md)
배운 내용을 오약하면 이렇습니다:
- **평균 경로의 길이 증가**. 처음 여기에서 볼 수 있는 것은, 평균 경로 길이가 증가하는 것입니다. 아마도 환경에 대해 잘 모를 때, 물 또는 늑대, 나쁜 state에 걸릴 수 있다는 사실입니다. 더 배우고 지식으로 시작하면, 환경을 오래 탐험할 수 있지만, 여전히 사과가 어디에 자라고 있는지 잘 모릅니다.
- **배울수록, 경로 길이 감소**. 충분히 배웠으면, agent가 목표를 달성하는 것은 더 쉽고, 경로 길이가 줄어들기 시작합니다. 그러나 여전히 탐색하게 되므로, 최적의 경로를 자주 빗겨나가고, 새로운 옵션을 탐험해서, 경로를 최적 경로보다 길게 만듭니다.
- **급격한 길이 증가**. 이 그래프에서 관찰할 수 있는 약간의 포인트는, 갑자기 길이가 길어졌다는 것입니다. 프로세스의 추계학 특성을 나타내고, 일부 포인트에서 새로운 값을 덮어쓰는 Q-Table 계수로 "spoil"될 수 있습니다. 관성적으로 학습률을 줄여서 최소화해야 합니다 (예시로, 훈련이 끝나기 직전에, 작은 값으로만 Q-Table 값을 맞춥니다).
전체적으로, 학습 프로세스의 성공과 퀄리티는 학습률, 학습률 감소, 그리고 감가율처럼 파라미터에 기반하는게 상당히 중요하다는 점을 기억합니다. 훈련하면서 최적화하면 (예시로, Q-Table coefficients), **parameters**와 구별해서, 가끔 **hyperparameters**라고 불립니다. 최고의 hyperparameter 값을 찾는 프로세스는 **hyperparameter optimization**이라고 불리며, 별도의 토픽이 있을 만합니다.
## [강의 후 퀴즈](https://gray-sand-07a10f403.1.azurestaticapps.net/quiz/46/)
## 과제
[A More Realistic World](../assignment.md)